Introduce
Pixhackbased on the Pixhawk hardware,The architecture was newly designed by cuav and made by cuav. because the hardware main structure is the same with the pix, so it is fully compatible with PX4 and ArduPilot. PIXHACK optimizes the power chip on the basis of Pix original edition, cuts down unnecessary AUX6 interface, the interface makes adjustment and is optimized, change to front and rear insert line. The main highlights are the IMU's separation design, built-in small general-purpose shock absorbing structure, and the use of a CNC integrated milling process. The anti-jamming performance and stability are qualitatively improved. Pixhack has been through Cuav's one-year-long design. Numerous versions of optimization and testing have achieved stable and ideal results.
Cover all models
The Pixhack V2 is a drone control system built by CUAV that can run PX4 and ArduPilot environments.
Applicable model: plane/copter/helicopters, VTOL, unmanned vehicles, unmanned boats.
Powerful processor
Based on STM32F427 (180MHZ) master and STM32F100 coprocessor.
Redundant design
Built-in 2 IMU redundancy designs (including 2 accelerometers, 2 gyros, 1 electronic compass, 1 digital barometer)
Supports 3 sets of power supply redundant switching
The built-in sensor data fusion mechanism and failover mechanism in the software greatly reduce the chance of crashes caused by flight control.
Enrich expansion
Scalable 1 set of electronic compass, 2 sets of NMEA or UBX standard GPS, CAN bus device (ESC), 2 I2C devices (smart battery, status light, optical flow smart camera, laser sensor, ultrasonic sensor, etc.)
Built-in shock absorber system
Separate design of sensor and main board, built-in high-performance shock absorption system, Able to adapt to a variety of severe environments
Technical specifications
| Hardware parameters | |
|---|---|
| Mian Processor | STM32F427 |
| Failsafe co-processor | STM32F100 |
| sensor | |
| Accelerometer 3 | LS303D\MPU6000 |
| Gyro 3 | L3GD20\MPU6000 |
| Compass 2 | LS303D |
| Barometer 2 | MS5611 |
| Interface | |
| Mavlink UART | 2 (with hardware flow control) |
| GPS UART | 2 |
| DEBUG UART | 1 |
| Remote signal input protocol | PPM/SBUS/DSM/DSM2 |
| RSSI | PWM or 3.3 analog voltage |
| I2C | 2 |
| CAN Standard bus | 1 |
| ADC input | 3.3V X1 , 6.6V X1 |
| PWM output | Standard 8 PWM IO + 5 Programmable IOs |
| Support models | |
| Plane / copter / helicopter / VTOL / rover etc. | |
| Working environment and physical parameters | |
| PM working voltage | 4.5 ~ 5.5 V |
| USB voltage | 5.0 V +- 0.25v |
| Servo voltage | 4.8~5.4V |
| working temperature | -10 ~ 60°c |
| Size | |
| Length x width x height | 68*44*17 |
| Weight | 63g |
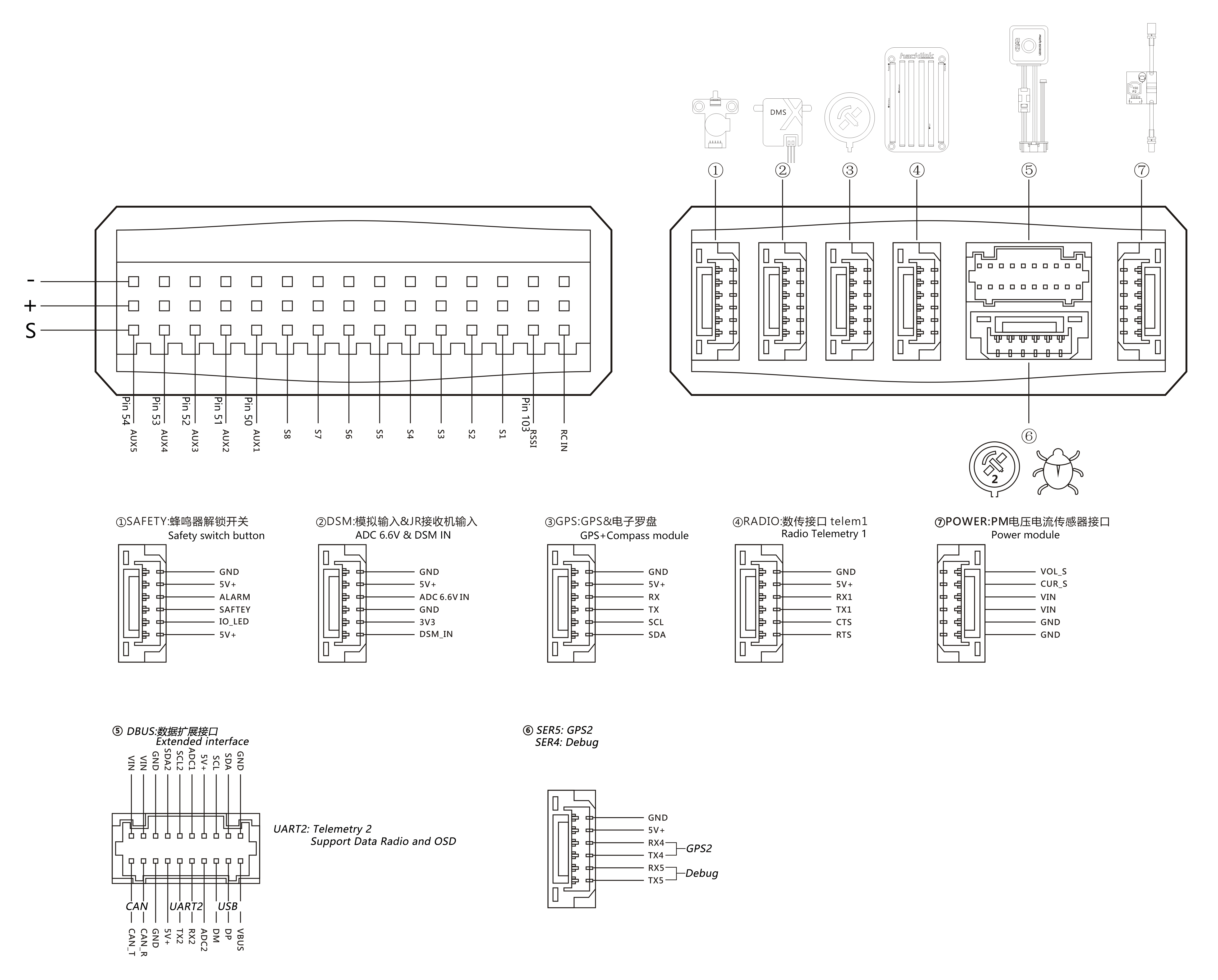
Interface cognition
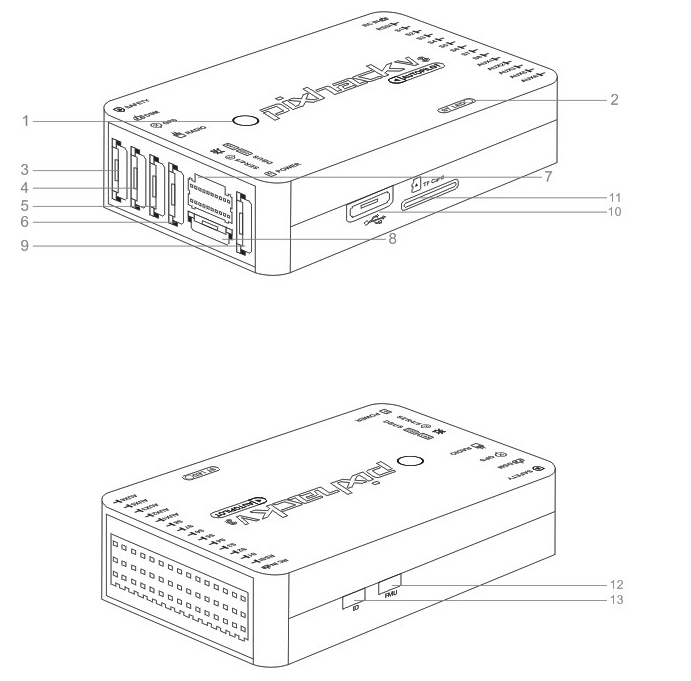
1.Main status led
2.boot led
3.Safe switch
4.DSM remote control signal + ADC6.6 interface
5.GPS+COMPASS interface
6.Digital interface
7.Bus expansion interface
8.DEBUG interface + GPS2 interface
9.POWER IV sensor interface
10.Micro USB interface
11.TF card interface
12.FMU STM32F4 restart button
13.IO STMF100 restart button
Interface definition