X7自动驾驶仪
X7是由CUAV设计和生产的高级自动驾驶仪;它采用比PX4上一代飞行控制器(FMUv5)更高性能的STM32H7系列处理器,并集成高精度工业级传感器和超低温飘传感器,相较于上一代飞行控制器性能更好、更稳定可靠;通过CUAV研发团队与Ardupilot团队的协作,Nora已经可以完美的运行ArduPilot固件;PX4固件现也已兼容X7飞控。
ArduPilot AC4.03/AP4.05/AR4.01以上版本固件完美兼容X7飞控。PX4 1.11.1以上版本固件兼容X7飞控。
其它特性
- 内置减震,适应不同的工况
- 三组IMU,支持故障智能切换
- 支持温度补偿,IMU工作状态更佳
- 模块化设计,支持定制载板
- 支持USB_HS,下载日志/参数速度更快(需待程序支持)
- 支持更多的Dshot输出
- 专用的UAVCAN电源接口
硬件参数
| 硬件参数 | |
|---|---|
| 处理器 | STM32H743 |
| 传感器 | |
| 加速计 | ICM-20649/ICM-20689/BMI088 |
| 陀螺仪 | ICM-20649/ICM-20689/BMI088 |
| 电子罗盘 | RM3100 |
| 气压计 | MS5611*2 |
| 接口 | |
| UART串口 | 5 |
| I2C | 6(两个单独的i2c接口,两个集成在GPS/uart 4接口) |
| PWM输出 | 14(其中12路支持dshot协议) |
| 遥控器信号输入协议 | PPM/SBUS/DSM |
| RC IN | 1 |
| RSSI输入 | PWM或3.3模拟电压 |
| CAN标准总线 | 2 |
| Power输入 | 2(Power A为普通ADC电源检测接口;Power C为CAN电流计接口 |
| 安全开关 | 1 |
| GPS接口 | 2(UART4可作为GPS2接口) |
| ADC | 1 |
| Debug | 1 |
| JATG | 1 |
| USB接口 | 1 |
| 支持机型 | |
| Ardupilot | 固定翼/3-8旋翼/直升机/VTOL垂直起降/无人车/无人船等 |
| PX4固件 | 3-8旋翼/固定翼(暂不支持混合翼、垂直起降机) |
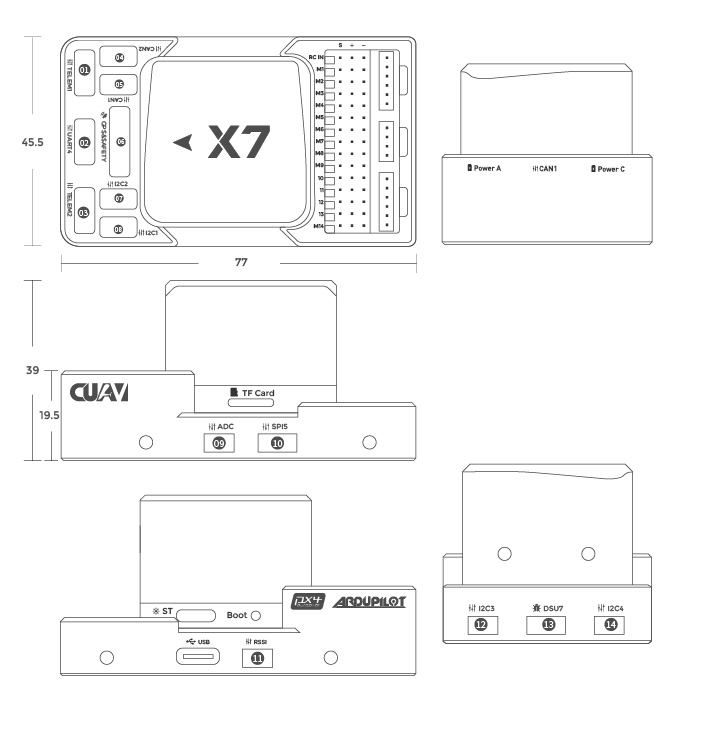
| 工作环境及物理参数 | |
| PM工作电压 | 4.5 ~ 5.5 V |
| USB电压 | 4.75 ~ 5.25 V |
| 伺服输入 | 0 ~ 36v |
| 工作温度 | -20 ~ 85°c |
| 重量 | 101g |
采购
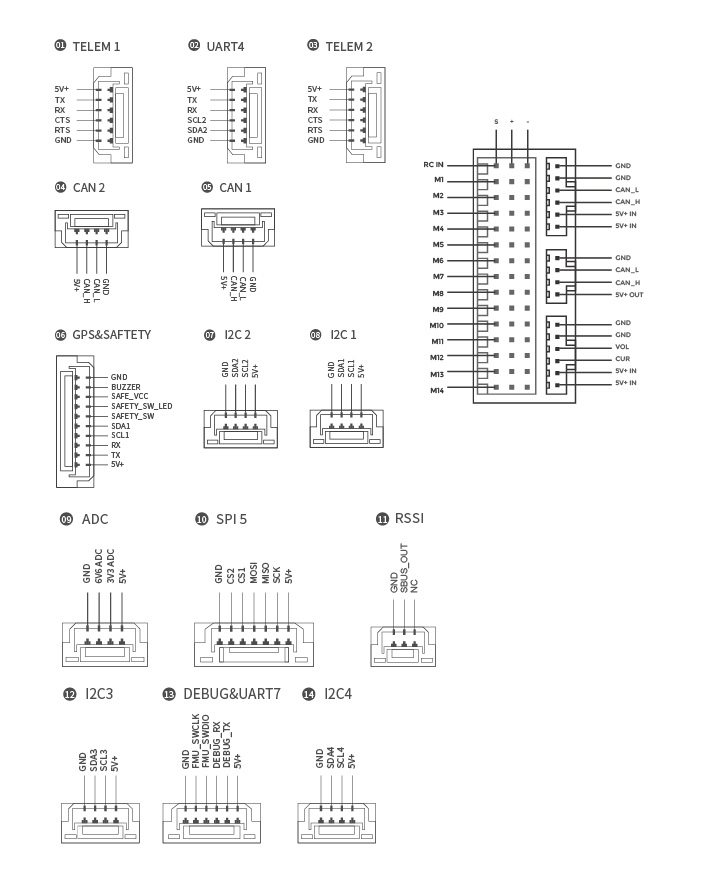
接口定义
X7自动驾驶仪采用与V5+相同的Pixhawk引脚标准,与Pixhack系列飞控定义不同,请尽量使用原装配线(绿色连接器为连接飞控端)。
ArduPilot固件编译命令
./waf configure --board CUAV-x7
./waf copter --upload