介绍
Pixhack是根据Pixhawk硬件架构平台上由CUAV设计,并有CUAV生产的一款32位开源硬件飞控,由于硬件主要架构跟pix完全相同,所以完全兼容3DR APM固件以及pix原生固件。PIXHACK在pix原版基础上优化了供电芯片,删减不必要的AUX6接口,接口做调整优化,改为前后方插线。主要的亮点是IMU分离设计,内置小型通用减震结构,并采用了CNC一体铣成型工艺,抗干扰性还是稳定性都有质的提升。Pixhack经过Cuav长达一年的设计,无数个版本的优化及测试,已经达到了稳定理想的效果。
覆盖全机型
Pixhack V2是一款的无人机控制系统,由CUAV全新打造,可运行 PX4 及 APM 环境。
支持包括:固定翼、多旋翼(3-8 旋翼)、直升机、垂直起降无人机 VTOL、无人车、无人船。
强大处理器
基于 STM32F427(180MHZ)主控及 STM32F100 协处理器。
冗余设计
内置 2组 IMU 冗余设计(包括 2 组加速计、2组陀螺仪、1组电子罗盘、1组数字气压计)
支持 3 组电源供电冗余切换
软件内建传感器数据融合机制及故障切换机制,将由飞控引起的坠机几率大大降低。
丰富扩展
可扩展 1 组电子罗盘、2 组 NMEA 或者 UBX 标准 GPS、CAN 总线设备(电调)、2 路 I2C 设备(智能电池、状态灯、光流智能相机、激光传感器、超声波传感器等)
内置减震系统
传感器与主板分离设计,内置高性能减震系统,各种严峻机型环境,适应性更强
技术规格
| 硬件参数 | |
|---|---|
| 主处理器Processor | STM32F427 |
| 协处理器Failsafe co-processor | STM32F100 |
| 传感器 | |
| 加速器Accelerometer *2 | LS303D\MPU6000 |
| 陀螺仪Gyro *2 | L3GD20\MPU6000 |
| 电子罗盘Compass *1 | LS303D |
| 气压计Barometer *1 | MS5611 |
| 接口 | |
| Mavlink UART串口 | 2(带硬件流控) |
| GPS UART串口 | 2 |
| DEBUG UART串口 | 1 |
| 遥控器信号输入协议 | PPM/SBUS/DSM/DSM2 |
| RSSI输入 | PWM或3.3模拟电压 |
| I2C | 2 |
| CAN标准总线 | 1 |
| ADC输入 | 3.3V X1 , 6.6V X1 |
| PWM输出 | 标准8 PWM IO + 5个可编程IO |
| 支持机型 | |
| 固定翼/3-8旋翼/直升机/VTOL垂直起降/无人机/无人船 | |
| 工作环境及物理参数 | |
| PM工作电压 | 4.5 ~ 5.5 V |
| USB电压 | 5.0 V +- 0.25v |
| Servo电压 | 4.8~5.4V |
| 工作温度 | -10 ~ 60°c |
| 尺寸 | |
| 长X宽X高 | 68*44*17 |
| 重量 | 63g |
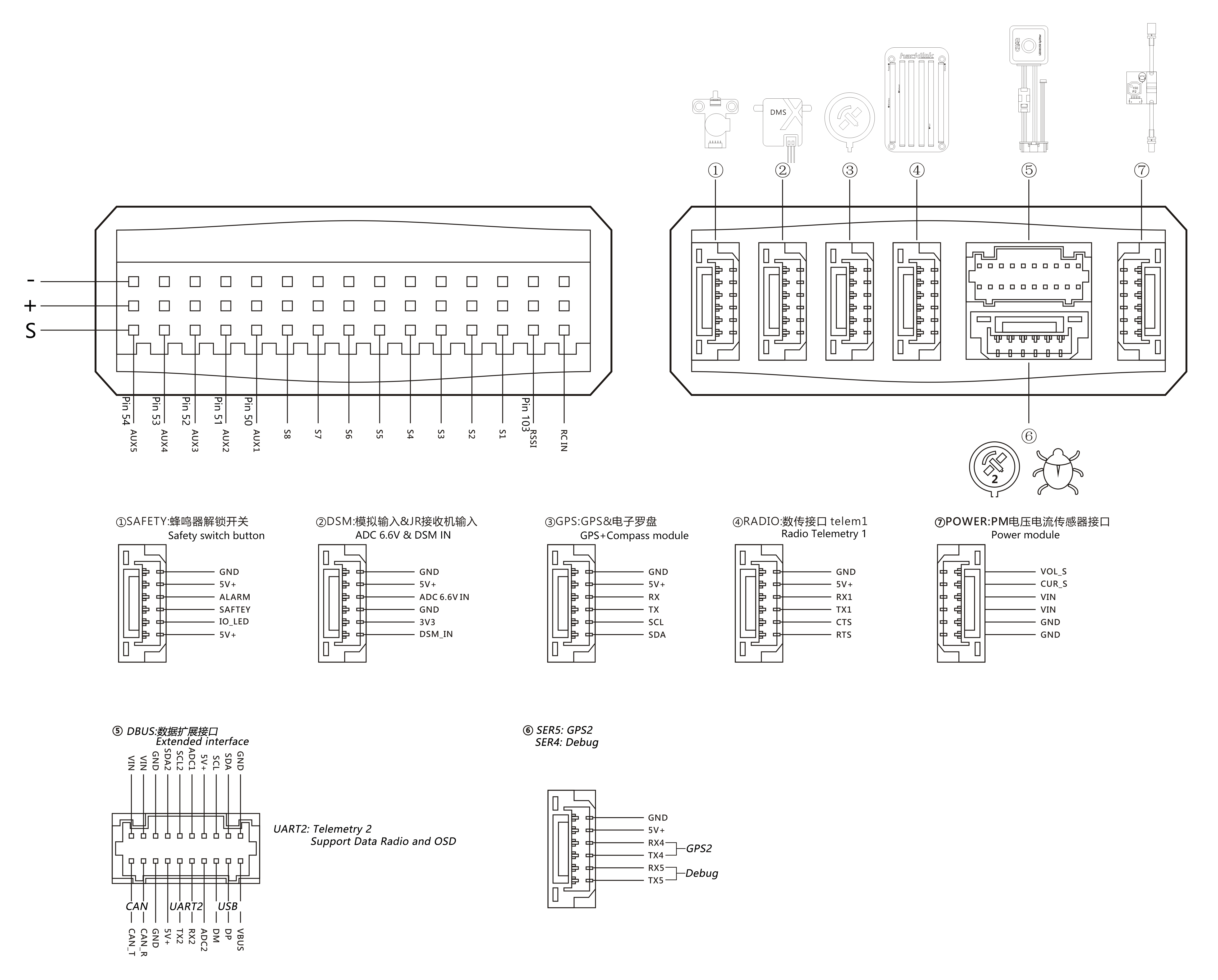
接口认识

- 主要状态灯
- 底层状态灯
- 安全解锁开关
- DSM遥控信号+ADC6.6接口
- GPS+COMPASS接口
- 数传接口
- 总线扩展接口
- DEBUG接口+GPS2接口
- POWER IV传感器接口
- micro USB接口
- TF卡接口
- FMU STM32F4重启按键
IO STMF100 重启按键
接口定义
*CUAV保留产品设计修改的权利,上述介绍可能与产品有细微差异,请以商品介绍界面和CUAV工作人员提供的资料为准。