NEO V2 PRO GNSS receiver
[! TIP] NEO v2 Pro has been discontinued, it is recommended that you choose NEO 3 Pro GPS, which has a more advanced M9N positioning module and better performance.
Overview
Neo V2 pro is a GNSS receiver based on UAVCAN communication protocol. It integrates industrial-grade compass, barometer, flight controller status light, buzzer, and safety switch in one. It has the characteristics of high safety and strong anti-interference. .

NOTE Ardupilot 4.0 and above firmware perfectly supports NEO V2 Pro; PX4 is not yet fully compatible with NEO V2 Pro (such as safety switches and buzzers cannot work).
Features
1.UAVCAN standard protocol, high real-time, strong anti-interference
2.Industrial sensor(RM3100), adapt to complex magnetic field environment
3.High-performance processing unit
4.internal high-precision barometer to meet the needs of different application scenarios.
5.Open source code to load custom programs.
6.Adopt SAW + LNA + SAW dual filtering design, which can effectively avoid the impact of GPS positioning reception from remote control, digital transmission, and 4G signals.
Key data
| Annotate | |
|---|---|
| Processor | STM32F412 |
| Compass | RM3100 |
| Barometer | MS5611 |
| GNSS receiver | UBLOX NEO M8N |
| RGB drive | NCP5623C |
| Buzzer | Passive buzzer |
| Safety switch | Physical button |
| GNSS | Beidou、Galileo、 GLONASS、 GPS |
| GNSS Augmentation System | SBAS:WAAS,EGNOS,MSAS QZSS |
| Number of concurrent GNSS | 2(Default GPS+GLONASS) |
| Frequency band | GPS:L1C/A GLONASS:L10F Beidou:B1I Galileo:E1B/C |
| Horizontal accuracy | 2.5M |
| Speed accuracy | 0.05M/S |
| Nav. update rate | 10Hz(Max) |
| Acquisition | Cold start:26S Hot start:1S Aided start:2s |
| Number of satellites(MAX) | 22+ |
| Sensitivity | Tracking and nav-167dBm Cold start -148dBm Hot star--157dBm Reacquisition -160dBm |
| Protocol | UAVCAN |
| Port TYpe | GHR-04V-S |
| Supported flight controller | CUAV series, Pixahwk series |
| Wave filtering | Wave filtering |
| Anti-Electromagnetic/radio frequency interference | EMI+RFI |
| Upgrade firmware | support |
| Support Flight control type | Ardupilot/PX4*(PX4 is still working hard to adapt to the clock) |
| Input voltage | 5V |
| Operating temperature | -10~70℃ |
| Size | 60*60*16MM |
| Weight | 33g |
Connect to v5 +
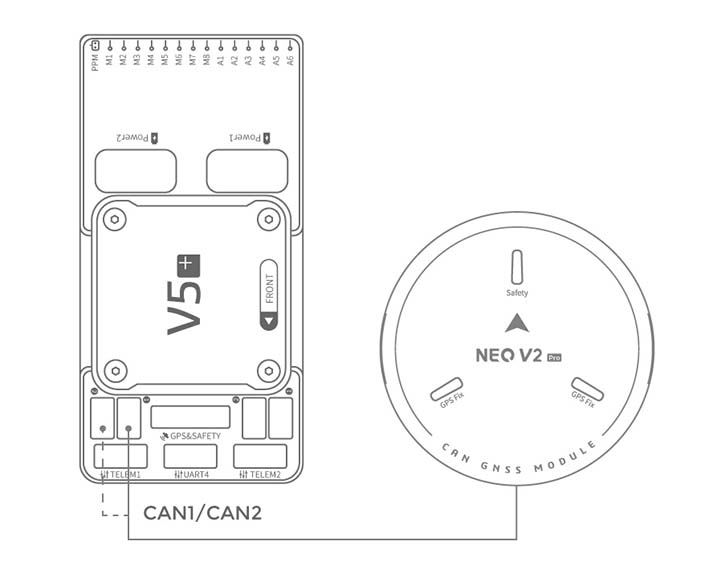
- Please connect it to the flight control CAN1 / CAN2 interface (CAN1 is recommended)
NOTE The connection of other PIX flight controllers is the same.
Enable
you need to set flight control parameters to enable Neo V2 pro; there are different setting methods according to the flight control firmware.
ArduPilot firmware
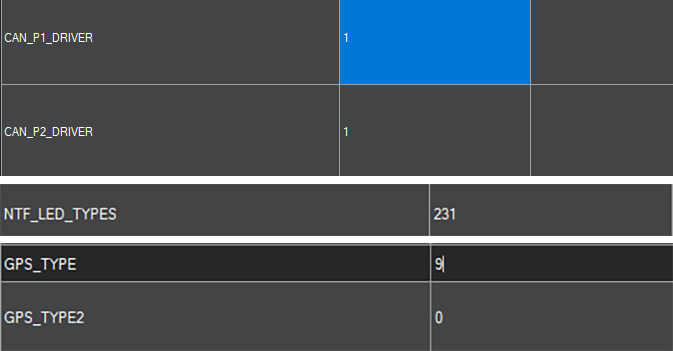
Set the following parameters in all parameter tables of Mission planner and restart after writing
CAN_P1_DRIVERset to 1.CAN_P2_DRIVERset to 1.NTF_LED_TYPESset to 231.GPS_TYPEset to 9.