X7+ Pro Controller
X7+ Pro is a high-end intelligent controller developed by CUAV® for industry and industrial applications. It is equipped with a high-performance STM32H7 processor with a processing speed of up to 480Mhz and supports double floating-point operations. It is also equipped with an ADIS16470 automotive-grade sensor with excellent gyroscope and accelerometer performance, supports low-error long-flight attitude calculation, and is equipped with an industrial-grade RM3100 magnetometer, which has strong anti-magnetic interference capabilities. The excellent processor performance and IMU performance enable unmanned system equipment to have better stability and anti-interference capabilities in complex environments.

[!TIP] X7+ Pro autopilot is a derivative version of X7 Pro. From January 1, 2022, X7+ Pro will replace X7 Pro; X7+ Pro is perfectly compatible with ArduPilot 4.10/PX4 V1.12.3 and higher firmware.X7+ Pro supports monitoring Servo port voltage, the maximum input voltage of Servo port is 10V; other parts have no difference.
Other characteristics
- The automotive-grade ADIS16470 gyroscope and accelerometer provide long-term stable and accurate dead-position attitude estimation.
- Industrial-grade RM3100 magnetic compass, with significant anti-magnetic interference capability
- New generation CUAV patented shock absorption, better shock absorption effect
- Three sets of IMU, support fault intelligent switching
- Support temperature compensation, IMU working condition is better
- Modular design, support customized carrier board
- Dedicated Dronecan power interface
Quick Summary
- Main FMU Processor: STM32H743
On-board sensors:
- Accelerometer/Gyroscope: ICM42688-P(X7 Pro:ICM-20649)
- Accelerometer/Gyroscope: ADIS16470
- Accelerometer/Gyroscope: ICM20689-P(X7 Pro:BMI088)
- Magnetometer: RM3100
- Barometer: MS5611*2
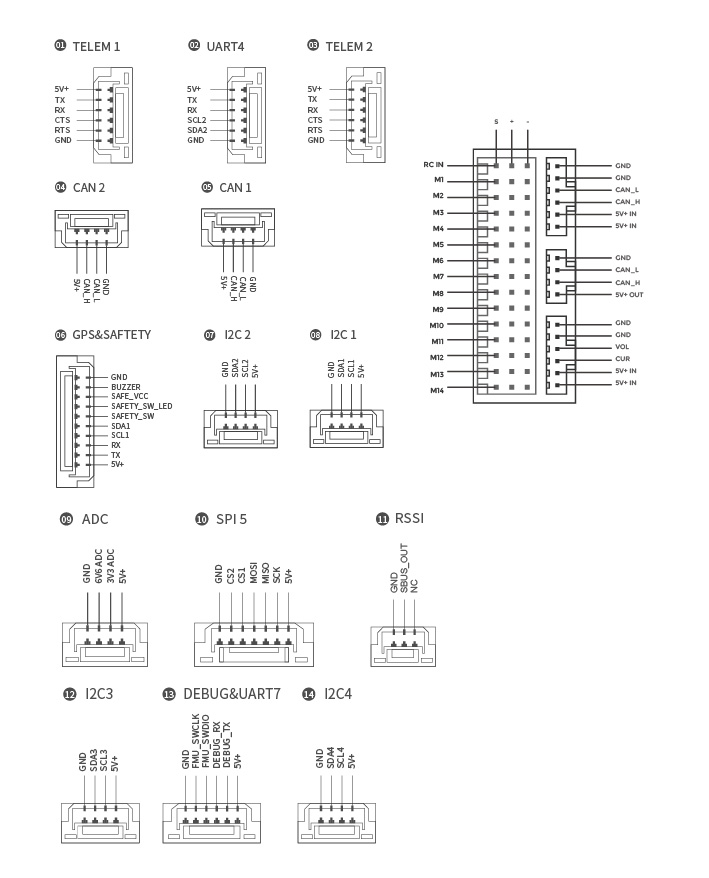
Interfaces:
- 14 PWM outputs (12 supports Dshot)
- Support multiple RC inputs (SBUs/PPM/DSM)
- Analogue / PWM RSSI input
- 2 GPS ports(GPS and UART4 ports)
- 6 i2c buses( 4 independent i2c interfaces, 2 integrated in GPS and UART4 interface)
- 2 CAN bus ports
- 2 Power ports(Power A is common adc interface, Power C is uavcan battery interface)
- 2 ADC intput
- 1 USB ports
- Power System:
- Power: 4.5~5.4V
- USB Input: 4.75~5.25V
- Servo Rail Input: 0~10V
- Weight and Dimensions:
- Weight: 101g
- Other Characteristics:
- Operating temperature: -20 ~ 85°c
- Three imus
- Supports temperature compensation
- Internal shock absorption
Purchase
Size and Pinouts
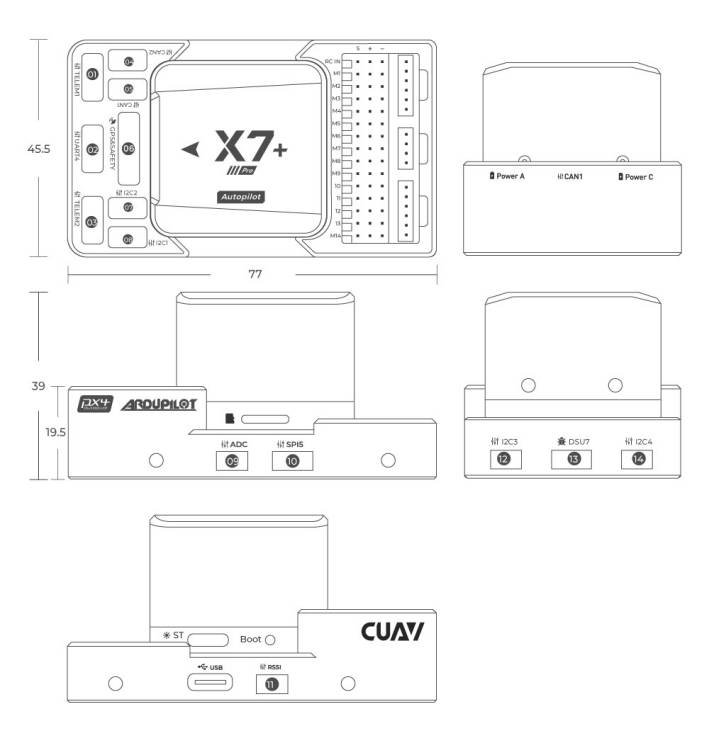
[!Warning] The RCIN port is limited to powering the rc receiver and cannot be connected to any power/load.
Voltage Ratings
- Nora AutoPilot can be triple-redundant on the power supply if three power sources are supplied. The two power rails are: Power A, Power C and *USB.
[!NOTE] The output power rails PWM OUT (0V to 10V) do not power the flight controller board (and are not powered by it). You must supply power to one of Power A, Power C or USB or the board will be unpowered.
Normal Operation Maximum Ratings
Under these conditions all power sources will be used in this order to power the system:
- POWERA and POWERC inputs (4.5V to 5.4V)
- USB input (4.75V to 5.25V)
Building ArduPilot Firmware
./waf configure --board CUAV-x7
./waf copter --upload
Debug Port
The system's serial console and SWD interface operate on the DSU7 port. Simply connect the FTDI cable to the DSU7 connector (the product list contains the CUAV FTDI cable).
Peripherals
- Digital Airspeed Sensor
- Telemetry Radio
- Rangefinders/Distance sensors
- others