RTK-BASE差分高精度GPS基站系统
概述
全新CUAV RTK-BASE差分高精度GPS基站系统,内置了多星单频RTK接收模块,P9超视距数据传输模块,WIFI通讯模块,高容量电池组可连续工作12小时,并运行着LINUX系统,多种工作模式,搭配C-RTK差分定位模块即可组成完整的厘米级差分定位系统,可灵活应用到无人机、无人车等领域。

内置RTK接收模块:
内置了高性能RTK多星单频接收模块,拥有72-channel通道,支持GPS L1 C/A, GLONASS L1OF, BeiDou B1I 卫星,RTK刷新率可达8HZ,接收灵敏度−160 dBm。
运行LINUX系统:
CUAV RTK-BASE采用ARM芯片架构并运行了LINUX系统,通过可靠和灵活的LINUX系统,可以扩展满足不同行业用户需求的应用.
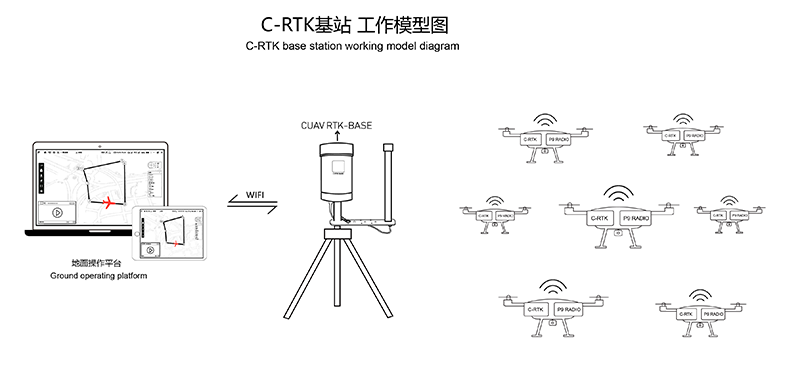
2种工作模式-覆盖百种应用场景 RTK广播模式:
RTK-BASE将接收到的RTK原始数据,通过内置数传以广播的方式,发送到同一群组内的无人机进行接收,接收数据的无人机不受数量限制,内置P9数传最远可到30KM,内置RTK模块基线长度最远可到10KM。
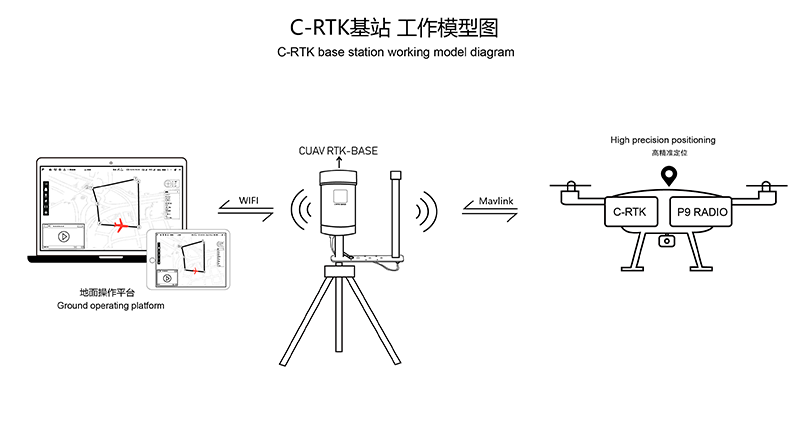
无人机单点模式:
RTK-BASE将接收到的RTK原始数据与mavlink进行封装,并通过WIFI发射热点,用户即可通过手机或者电脑地面站直接与无人机连接通讯,而无人机也可以直接接收RTK和mavlink交互数据。
内置WEB服务器
通过WIFI即可访问RTK-BASE WEB管理界面,通过WEB管理界面,可以实时查看RTK信号状态,电量信息,并可以对RTK运行模式、参数和P9数传进行相应配置,还可以对RTK-BASE进行升级还原操作
内置电池
内置了7000mah 7.4V容量电池以及PMU电池管理芯片,依靠内部电池可连续工作12小时,支持12V直接充电,并很容易扩展外部太阳能充电,实现7X24小时运行
集成OLED显示屏
CUAV RTK-BASE集成了一个OLED显示屏,通过oled显示屏可以显示当前运行模式、电量状态、RTK状态以及相关无人机状态
应用场景