电源模块设置
Ardupilot固件
CAN PMU lite
X7系列飞行控制器套装包含CAN PMU lite电源模块,当飞控运行Ardupilot时,您只需要将其连接到Power C,不需要进行电池监视器设置。
如果错误的设置,请修改'BATT_MONITOR' 为8,写入参数并重启。
HV PM/模拟电流计
无论如何,在X7系列飞行控制器中,我们不推荐使用模拟电流计;如果您使用模拟电流计,请将电流计连接到Power A,然后将'BATT_MONITOR'设置为4写入参数并重启。
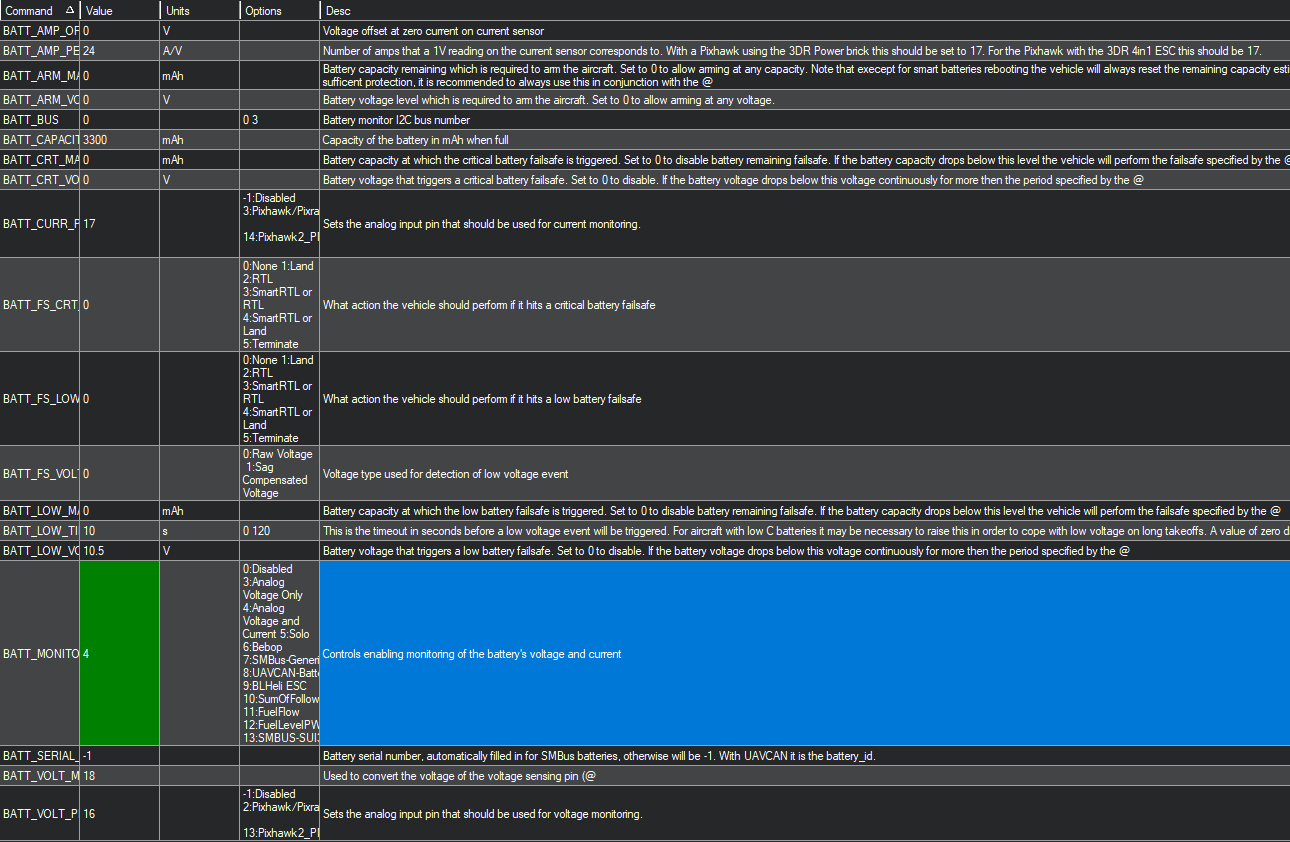
X7系列飞行控制器默认设置好了电压和电流检测引脚,如果您错误的设置了电流计,请修改下列参数:
- BATT_MONITOR=4
- BATT_VOLT_MULT=18
- BATT_V0LT_PIN=16
- BATT_CURR_PIN=17
- BATT_AMP_PERVLT=24
PX4固件
CAN PMU Lite
X7系列飞行控制器套装包含CAN PMU Lite电源模块,当飞控运行Ardupilot时,您只需要将其连接到Power C。
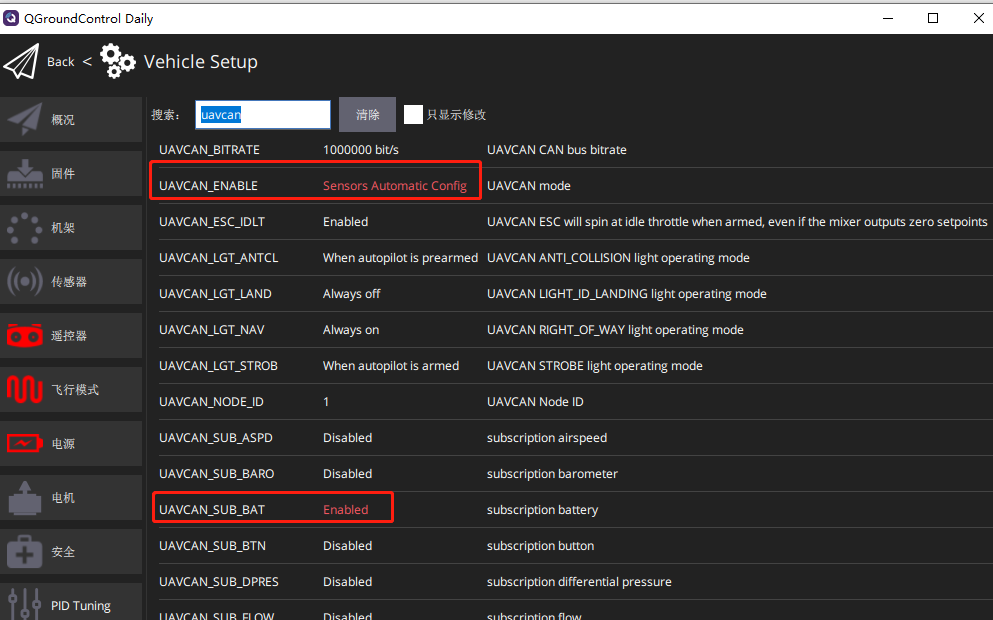
- 连接到QGC地面站》设置》参数设置
- 将UAVCAN_ENABLE参数设置为Sensors Automatic config
- 将UAVCAN_SUB_BAT参数设置为Enabled
- 写入参数并重启
HV PM/模拟电流计
无论如何,在X7系列飞行控制器中,我们不推荐使用模拟电流计;如果您使用模拟电流计,请按照如下设置:
- 填写电芯数量
单节满电压(一般锂电池设置为4.0~4.2v)
分压比根据厂商提供的数据填写{18(HV_PM)}
- 电流电压比根据厂商提供的数据填写(24(HV_PM)