加载固件
在使用前,您需要为Nora刷写对应类型的固件程序;Nora可以支持Ardupilot平台的所有类型固件,PX4平台的固件也将会支持。下面将描述如何加载Ardupilot固件。
加载ArduPilot固件(又称APM固件)
X7系列飞控支持ArduPilot,下面主要讲解如何加载ArduPilot固件。
ArduPilot固件4.03以上固件完美兼容x7系列飞控(X7/NORA/X7 PRO).
使用ArduPilot固件前请将mission planner升级到1.3.70及以上版本地面站。
在线烧录固件:
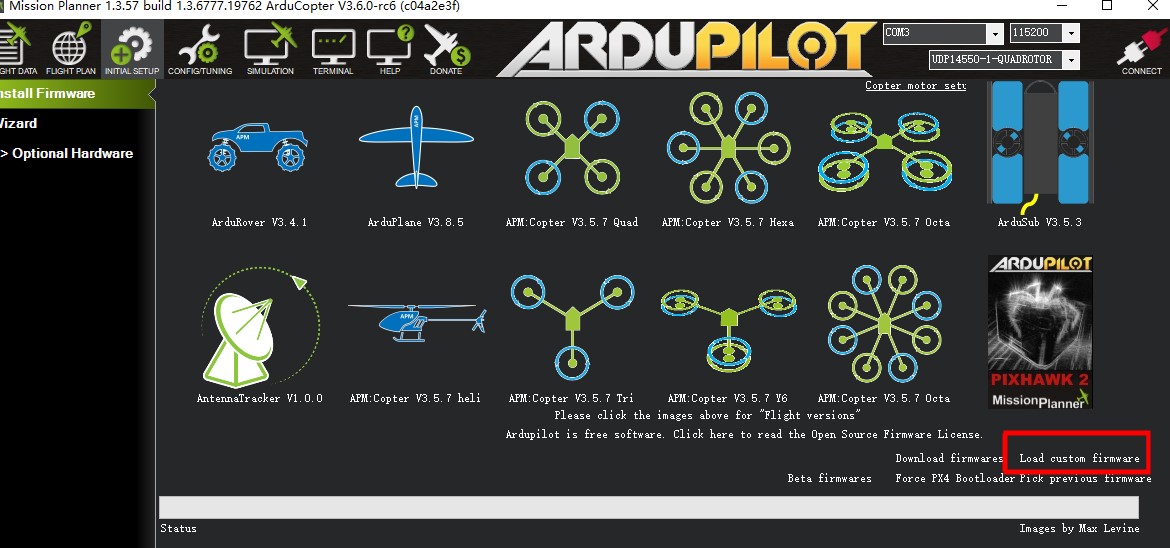
将飞控接入到电脑,打开地面站,点击初始设置界面》安装固件》选择您需要的固件类型》等待烧录完成.
本地烧录固件:
请先下载固件到本地: Nora/Nora+(以下固件均为Ardupilot官方固件):
固定翼(包含垂直起降机固件)
X7/X7+/X7 pro/X7+ Pro(以下固件均为Ardupilot官方固件)
固定翼(包含垂直起降机固件)
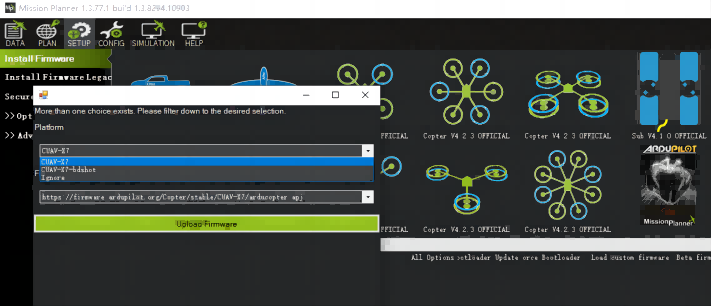
选择加载自定义固件》选择下载的固件》等待烧录完成
加载PX4原生固件
PX4原生固件
通过CUAV研发团队与PX4团队的努力适配,现X7以及Nora已经兼容PX4固件。
X7 pro因NUTTX系统不支持超过8bit的传感器数据,暂时无法运行PX4固件,需等待PX4团队升级系统后方可兼容。
支持机型
当X7与NORA运行PX4固件时,最多输出8路PWM,M9~M14暂无法输出pwm信号,故暂时只能支持多旋旋翼/固定翼机型,不支持垂直起降机;如果您需要将其用在垂直起降机上,请使用Ardupiolt固件或者等待固件更新修复。
在线烧录:
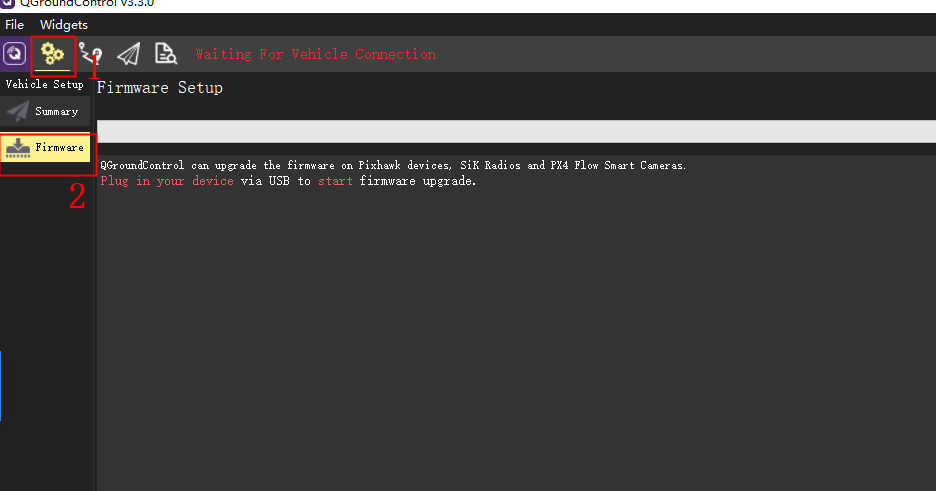
请下载QGC地面站(提取码:bgi8);打开地面站》点击设置图标》点击firmware
因最新版本的qgc地面站有些BUG待修复,请先暂时使用上述链接的QGC地面站。
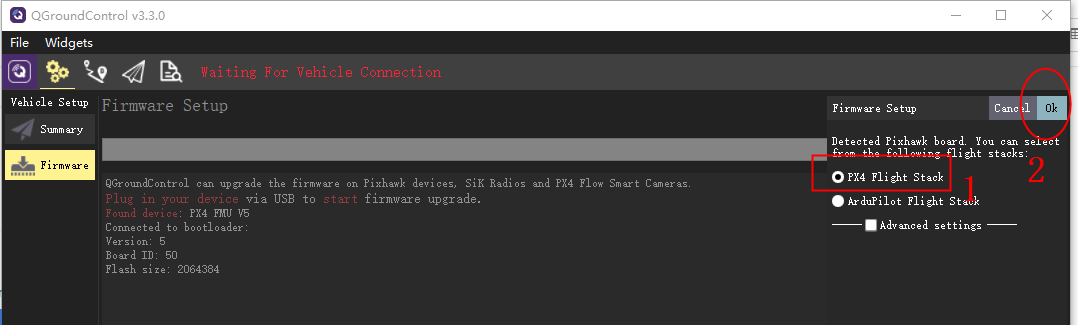
将X7/Nora通过usb线连接到电脑,地面站右边将弹出下图窗口》选择需要PX4 Flight STACK》OK
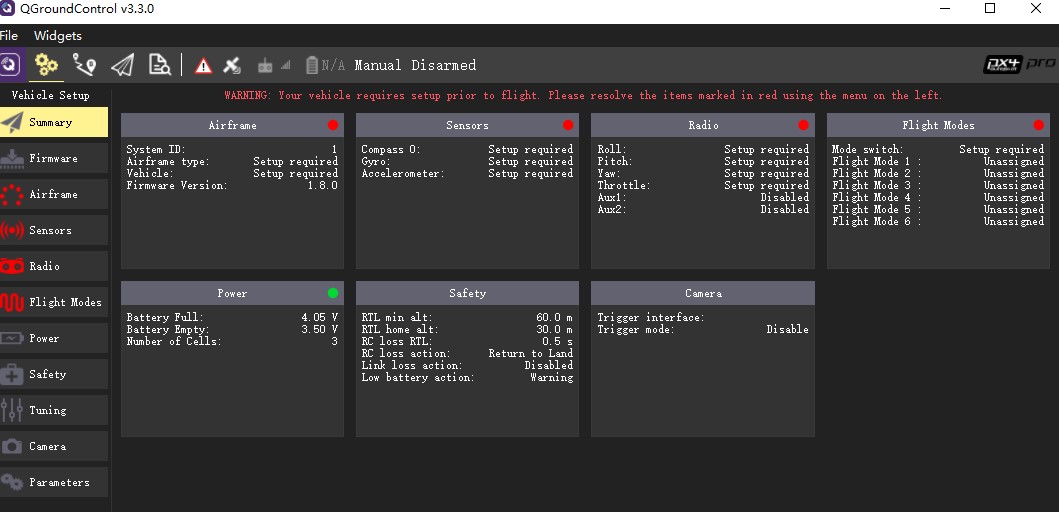
加载完成,如不进行操作,十几秒后将自动连接。
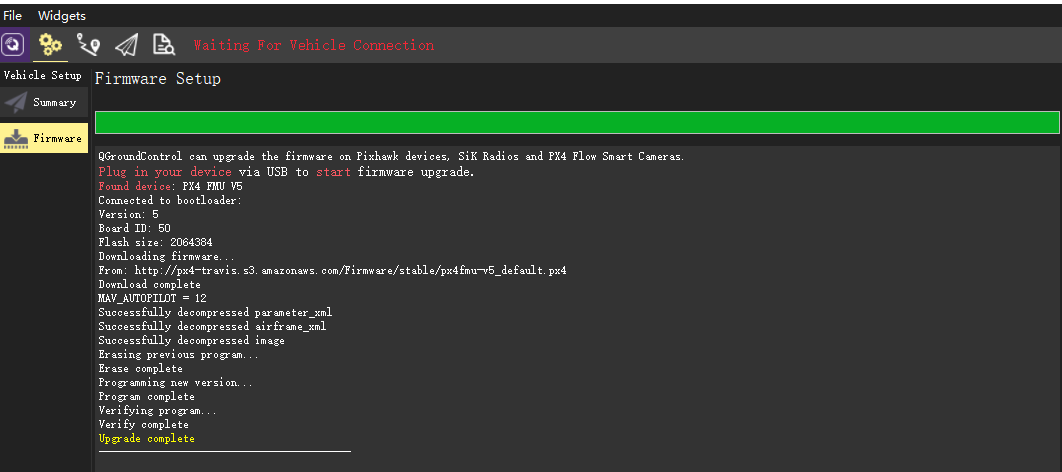
QGC 4.10.0(不含)以上版本地面站兼容X7/Nora飞控,如果使用较低的版本,需要手动建立连接并且无法刷写固件。
本地烧录:
- 请先下载固件到本地:
- 打开地面站》点击设置图标》点击firmware
将飞控通过usb线连接到电脑,地面站右边将弹出下图窗口》选择需要PX4 Flight STACK》勾选advanced settings>custon firmware file》找到下载的固件》ok
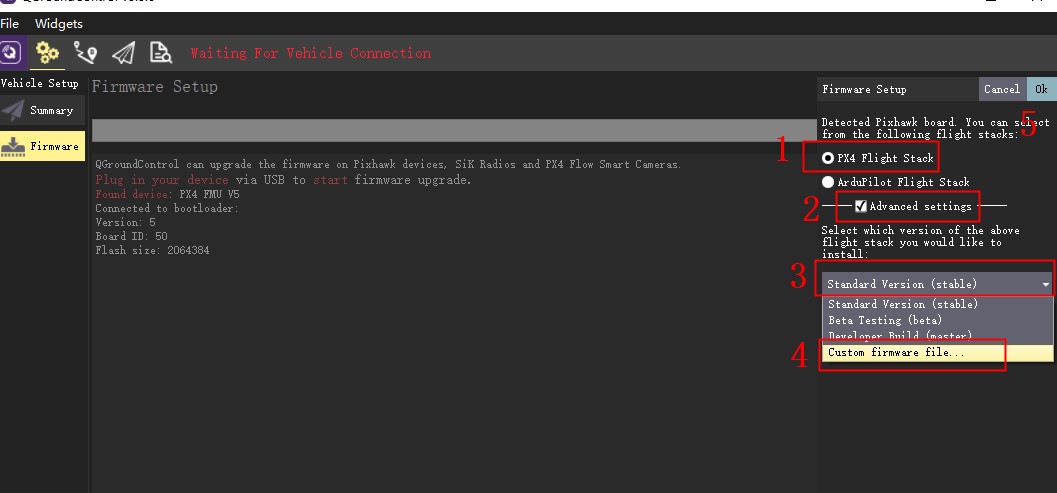
加载完成,如不进行操作,十几秒后将自动连接。