C-RTK2 HP使用指南
硬件连接
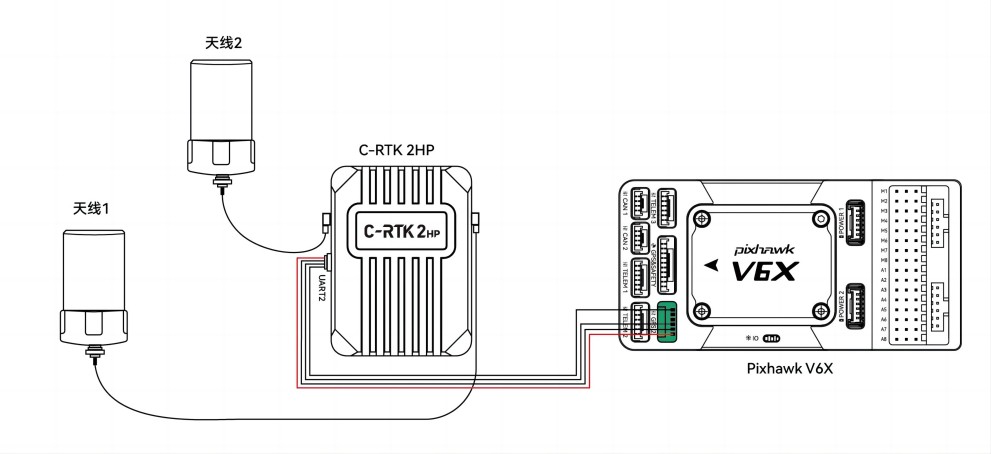
C-RTK2 HP支持以下方式连接(二选一):
CAN(推荐)
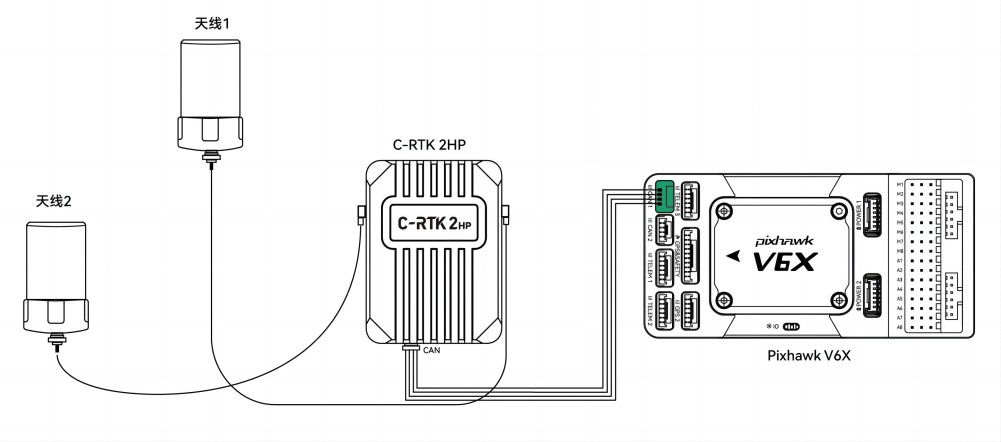
UART
参数配置
在Missionplanner/配置调参/全部参数表中设置以下参数:
- GPS_TYPE = 9(droncan:9;UART:25)
- EK3_SRC1_YAW = 2(GPS)或3(优先使用GPS,罗盘作备份)
- GPS_MB1_TYPE=1
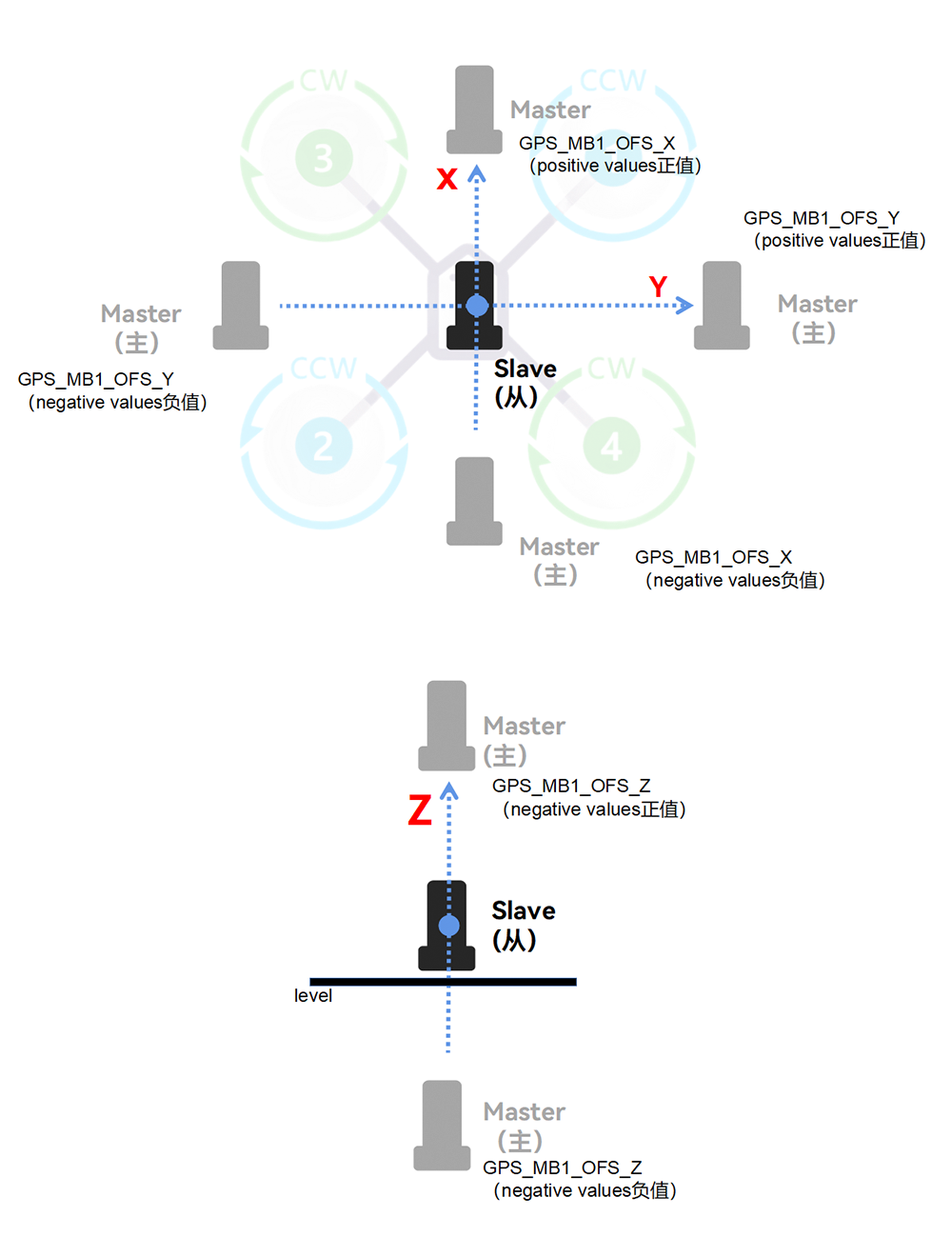
- GPS_MB1_OFF_X:主天线相对于从天线的X轴偏移量(距离,以米为单位),如果主天线在从天线的前面为正值。
- GPS_MB1_OFF_Y:主天线相对于从天线的Y轴偏移量(距离,以米为单位),如果主天线在从天线的右侧为正值。
- GPS_MB1_OFS_Z:主天线相对于从天线的Z轴偏移量(距离,以米为单位),如果主天线低于从天线,则为正偏移量。
GPS定位偏移
C-RTK2 HP以主天线位置为准,如果无法将其安装于无人系统的重心位置;您需要设置其与重心位置的偏移值,以作纠正。
[!NOTE] 未设置偏移量或错误的偏移设置,将会导致无人机设备获得错误的定位信息,会导致无人机航向偏转时发生位置偏移或者定位不准确.
GPS_POS1_X:主天线相对于重心的X轴偏移量(距离,以米为单位),如果主天线在重心的前面为正值。
GPS_POS1_Y:主天线相对于重心的Y轴偏移量(距离,以米为单位),如果主天线在重心的右侧为正值。
GPS_POS1_Z:主天线相对于重心的Z轴偏移量(距离,以米为单位),如果主天线低于重心位置为正值。
案例
以下图安装为例:

主天线位于重心及从天线的正右侧,高于重心2cm。
启用C-RTK2 HP
- GPS_TYPE=9(droncan)
- EK3_SRC1_YAW =3
- GPS_MB1_TYPE=1
天线偏移设置
- GPS_MB1_OFF_X=0
- GPS_MB1_OFF_Y=0.58
- GPS_MB1_OFS_Z=0
GPS定位偏移设置
- GPS_POS1_X=0.00
- GPS_POS1_Y=0.29
- GPS_POS1_Z=-0.02