Skye2 Nano Quick Start Guide
The setup and configuration described in this chapter apply when using the Skye2 Nano with a controller running ArduPilot firmware.
Enable
Run Mission Planner and go to the Config > FULL Parameter List interface to set the following parameters and then restart the vehicle.
//If connected to CAN1
- CAN_P1_DRIVER=1
- CAN_D1_PROTOCOL=1
//If connected to CAN2
- CAN_P2_DRIVER=1
- CAN_D2_PROTOCOL=1
//Set the airspeed sensor type to UAVCAN and enable it.
- ARSPD_TYPE=8
- ARSPD_USE=1
Airspeed offset calibration
When there is no wind and the airspeed display is greater than 3m/s, please reset the airspeed to zero before taking off.
- Run the Mission planner software and connect the flight controller
- Make sure the pitot tube is in a windless environment
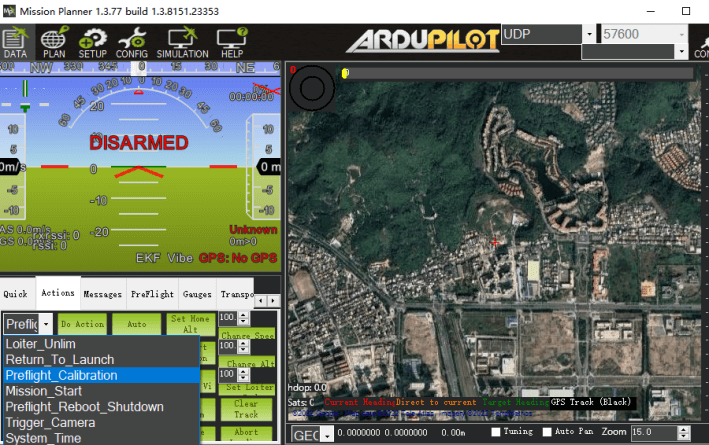
- Open Mission planner>Flight data>Action bar
- Select "Preflight Calibration" in the first check box; click the "Perform Action" button on the right
Pre-flight inspection
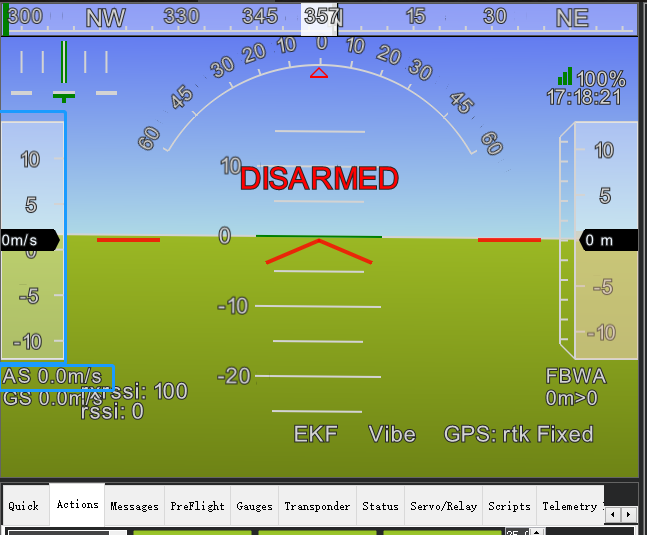
Before flying, please connect to the ground station to check that there is no wind and ensure that the airspeed value is within the range of 0~3m/s (if it exceeds the range, need perform airspeed offset calibration)
- Hold the pitot tube with your hand and blow air into the pitot tube. If the airspeed value changes according to the airflow speed, the inspection is complete.
Airspeed calibration
[!NOTE] The airspeed ratio of different installations and individual airspeed gauges will be somewhat different. The airspeed gauge needs to be calibrated on the first flight.
//Enable automatic airspeed calibration - ARSPD_AUTOCAL=1Perform calibration (choose one of the following two methods):
- A: Lift off in QStabilize or QLoiter multi-axis mode and convert to FBWA (self-stabilizing A mode) to control the drone to fly and hover for about 5 circles. After the ground station message bar prompts that the calibration is completed, execute the landing. After the calibration is completed Set ARSPD_AUTOCAL to 0.
- B: If you don’t know how to fly in FBWA mode, you can fly with the airspeed sensor enabled but not using it (ARSPD_USE=1; ARSPD_TYPE=8; do not fly in a windy environment Perform this operation); the aircraft will fly using ground speed (relative ground speed), and use Loiter mode to hover for about 5 circles after takeoff. The ground station message bar prompts that after the calibration is completed, perform landing. After the calibration is completed, set ARSPD_AUTOCAL to 0.