PMU 2Lite 配置指南(ArduPilot)
本章适用于将 PMU 2Lite 搭配 ArduPilot 飞行栈(运行 ArduPilot 固件的控制器)使用的场景。
[!TIP] 一般情况下,PMU 2lite是即插即用的,不需要设置本章中的任何配置;只需要进行硬件连接。
启用电压电流检测
启用电压电流检测需配置 PMU 2Lite相关的控制器参数。将控制器连接至MissionPlanner地面站,在全部参数表中设置以下参数,写入后重启控制器:
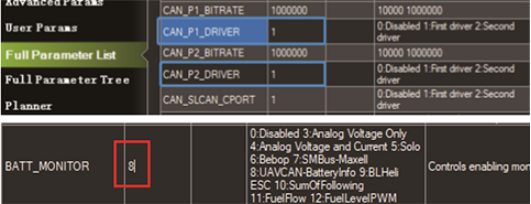
CAN_P1_DRIVER 设置为 1
CAN_P2_DRIVER 设置为 1
BATT1_MONITOR 设置为 8
[!TIP] 对于ArduPilot 4.6以下版本固件
BATT_MONITOR设置为8。
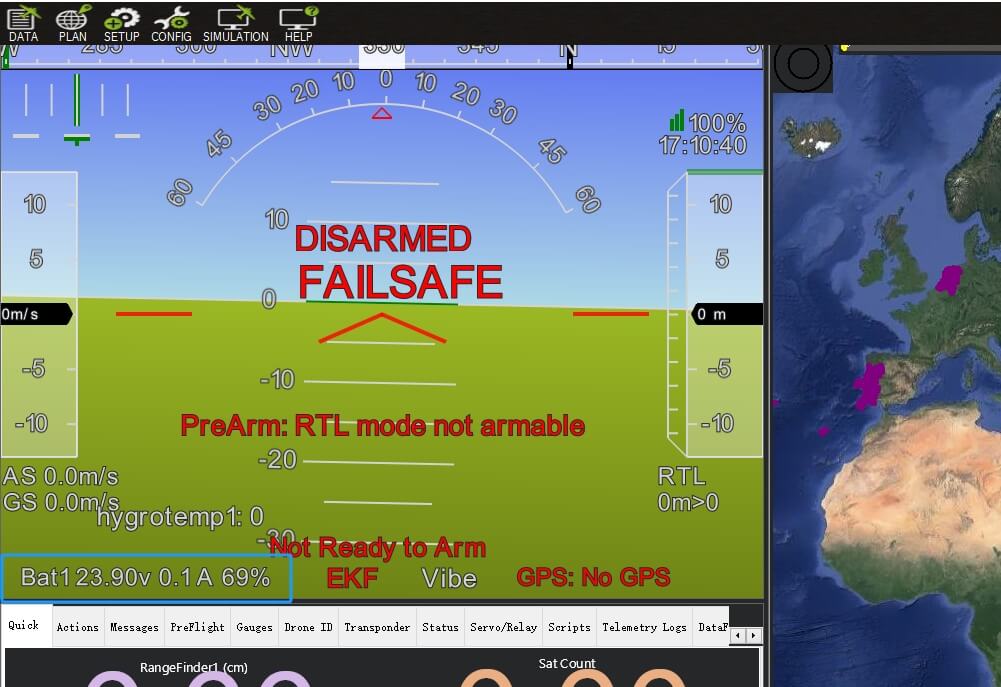
查看电源信息
系统参数
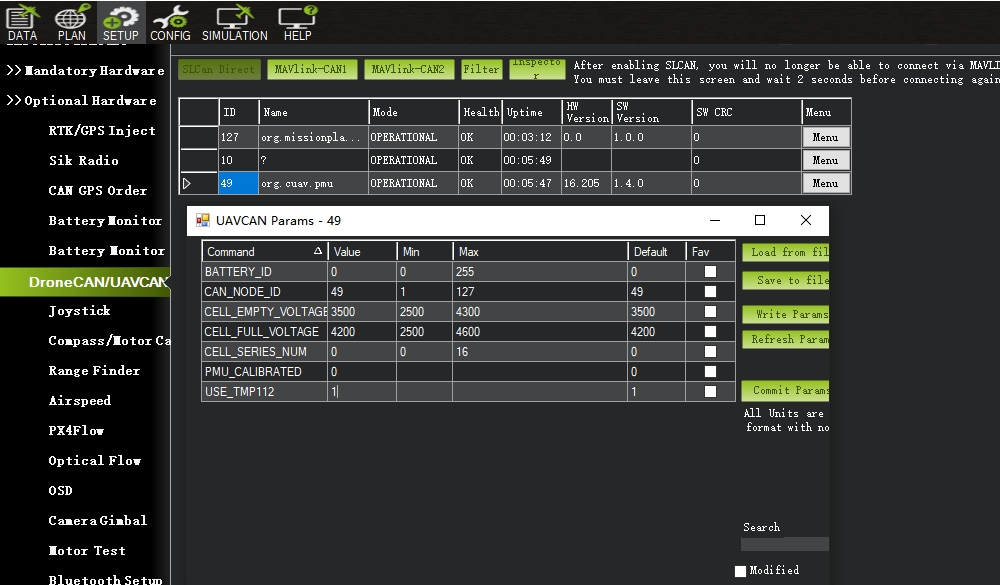
PMU 2Lite 提供7个参数供用户个性化设置:
BATTERY_ID // 电池 ID,无效
CAN_NODE_ID // CAN 节点 ID
CELL_SERIES_NUM // 电池电芯数量,默认值为 0(自主识别),用于估计电量百分比。
CELL_FULL_VOLTAGE // 单片电芯满电电压,用于估计电量百分比。
CELL_EMPTY_VOLTAGE // 单片电芯空电电压,用于估计电量百分比。
CALIBRATION_PARAM // 校准状态标识符,数值为 1 表示已校准(只读,不可写)。
USE_TMP112 // 温度传感器,默认值为 1(开启),设置为 0 可关闭。
[!NOTE] 通常情况下,默认参数可满足大多数用户需求,非必要请勿修改。
修改参数
- 将控制器连接至 MissionPlanner 地面站。
- 进入配置 > 可选硬件 > Dronecan/UAVCAN 设置界面。
- 点击“mavlink-can1”,找到PMU 2Lite 信息栏。
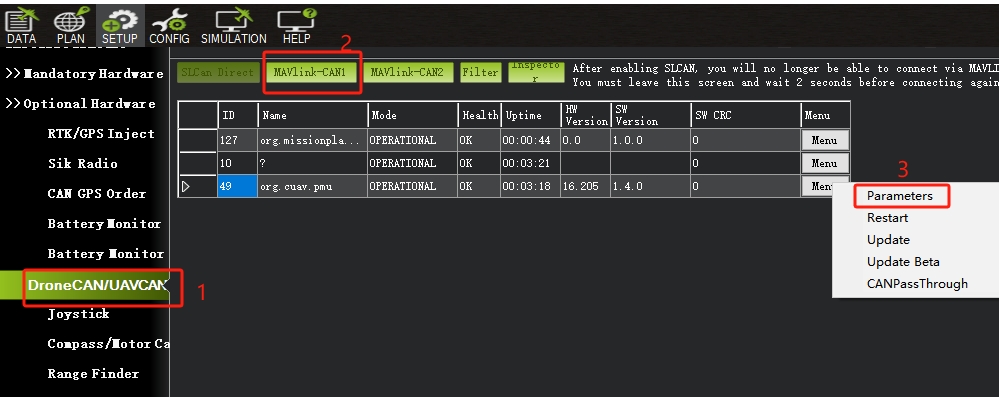
- 找到需修改的参数并设置,保存后重启控制器。
高压电芯适配
PMU 2Lite系统以锂电池标准电压平台设定(满电4.25),对于高压电芯平台(4.35V/4.45V)需要修改PMU 2Lite的系统参数,以更精准的测算电量。 以一块 6S电池组(单片电芯满电电压 4.35V、空电电压 3.3V)为例,在 PMU 2Lite 参数表中设置以下参数:
CELL_SERIES_NUM = 6
CELL_FULL_VOLTAGE = 4350
CELL_EMPTY_VOLTAGE = 3300
点击“Write params(写入参数)”,之后重启控制器。