Load PX4 firmware
The V5 series autopilot supports ArduPilot. The following mainly explains how to load PX4 firmware.
PX4 firmware
In the V5+/V5 nano as a powerful flight control system, of course, the compatibility of the PX4 native firmware is indispensable. During the product testing phase, CUAV and PX4 team reached an in-depth cooperation intention, and will carry out in-depth cooperation and communication on the software and hardware adaptation of PX4 native firmware and V5+/V5 nano. Through continuous testing and modification, V5+/V5 nano The dedicated PX4 firmware has been released in a stable version (first version is 1.91 stable).
Load firmware online:
Please install QGoundcontrol,open QGoundcontrol》Click the settings icon》Click firmware 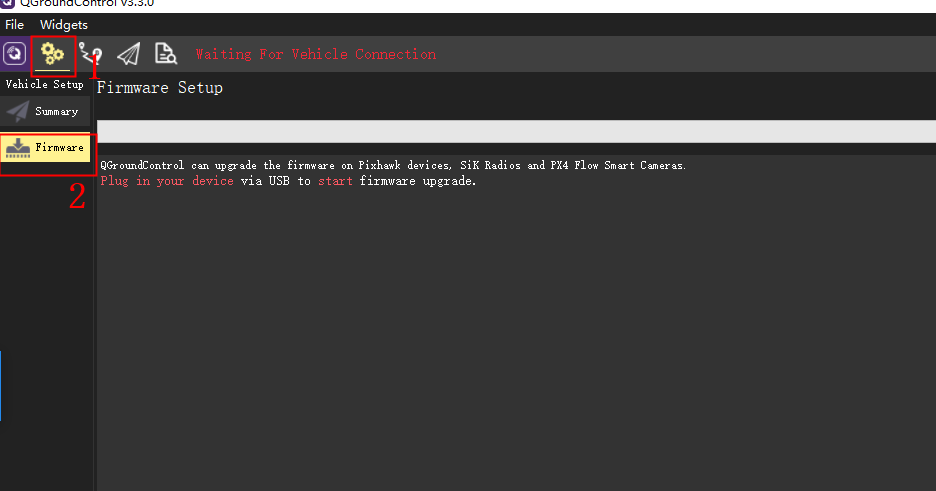 》Connect the V5 AutoPilot to the computer via the usb cable》Select PX4 Flight STACK》OK
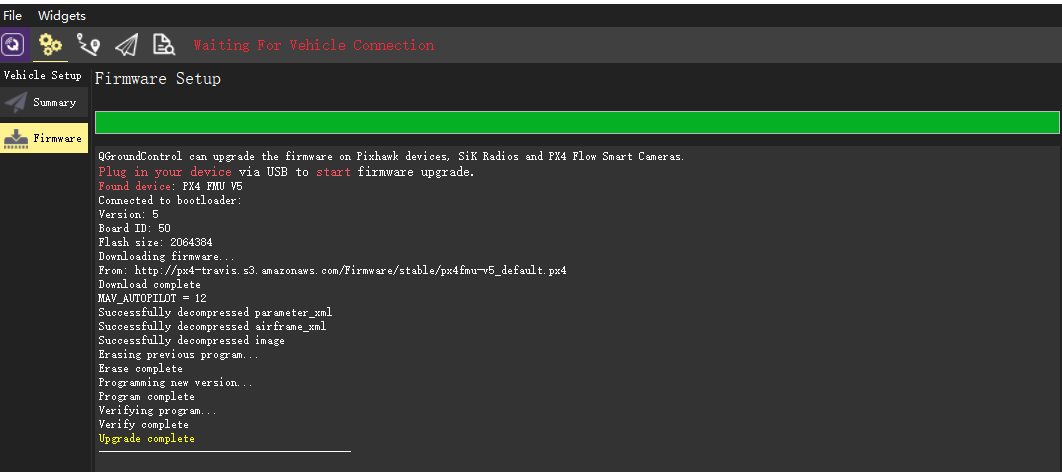
》Connect the V5 AutoPilot to the computer via the usb cable》Select PX4 Flight STACK》OK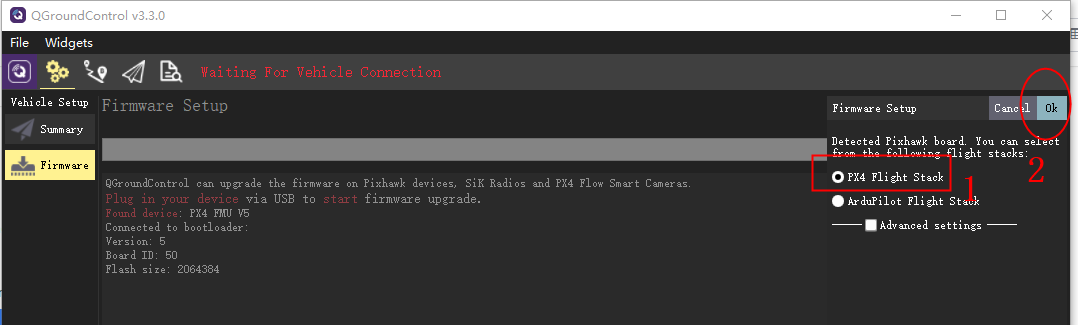 Waiting for the firmware to end.
Waiting for the firmware to end.
Load custom firmware:
Please download PX4 firmware to your computer.
open QGoundcontrol》Click the settings icon》Click firmware 》Connect the V5 AutoPilot to the computer via the usb cable》Select PX4 Flight STACK》advanced settings》custon firmware file》Find the firmware》ok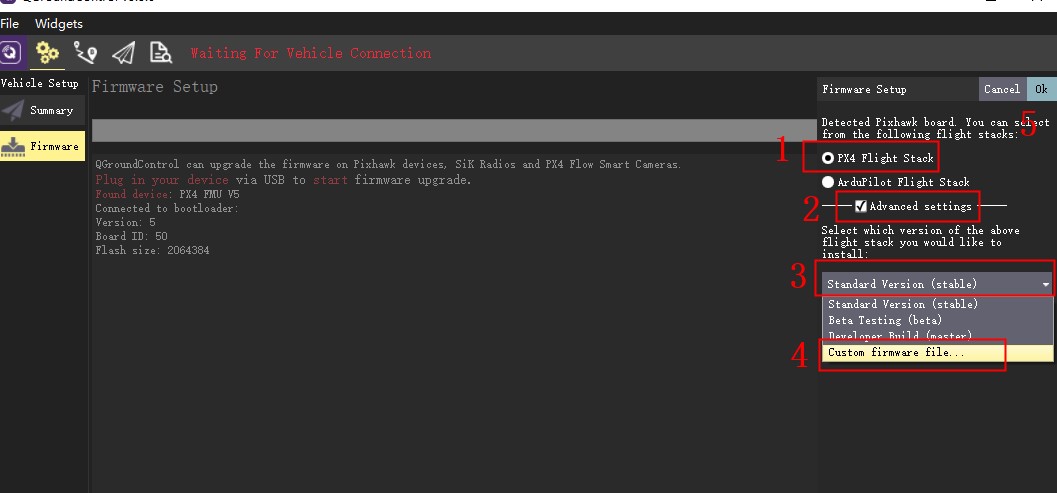 Waiting for the firmware to end.
Waiting for the firmware to end.