PX4固件使用须知
本章将描述Pixhawk V6X V2®运行PX4固件须知。
加载固件
Pixhawk V6X V2®智能控制器支持PX4,下面主要讲解如何加载PX4固件。
[!NOTE] Pixhawk V6X v2兼容PX4 v1.17.0及以上版本固件;Pixhawk V6X兼容V1.13.3及以上版本固件。
在线烧录固件:
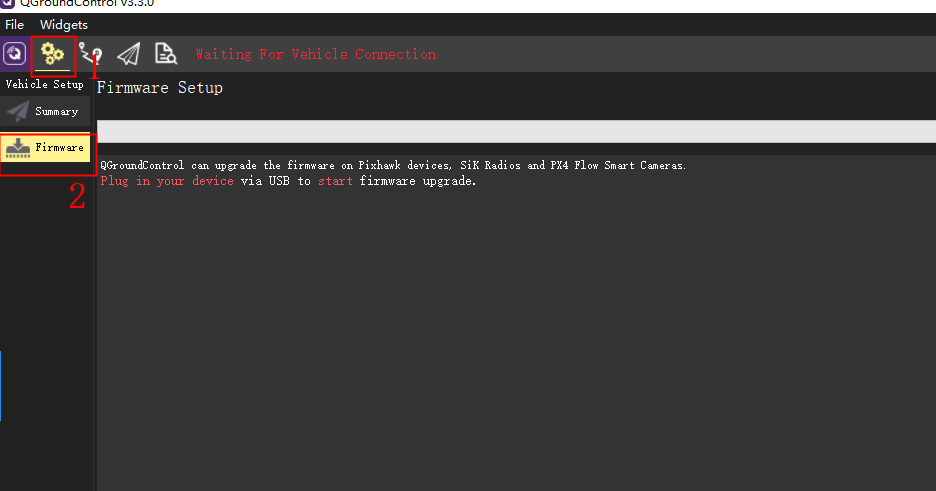
将智能控制器接入到电脑,打开QGroundControl地面站,点击设置图标》点击firmware.
将智能控制器通过usb线连接到电脑,地面站右边将弹出下图窗口》选择需要PX4 Flight STACK》OK
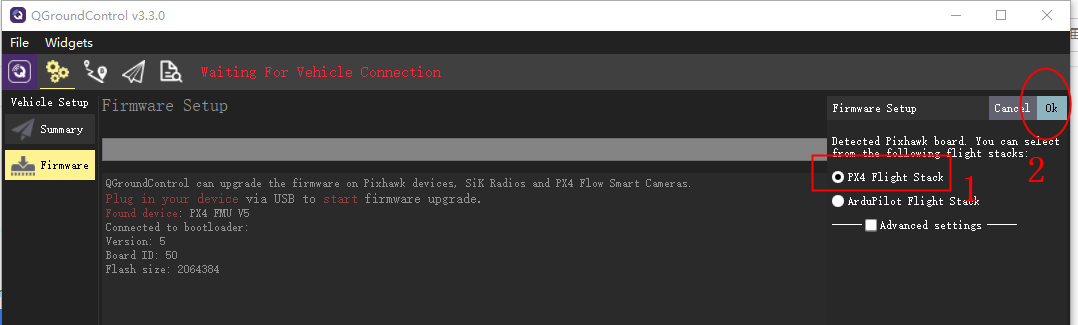
加载完成,如不进行操作,十几秒后将自动连接
本地烧录:
下载固件至本地。
打开地面站》点击设置图标》点击firmware
- 将智能控制器通过usb线连接到电脑,地面站右边将弹出下图窗口》选择需要PX4 Flight STACK》勾选advanced settings>custon firmware file》找到下载的固件》ok
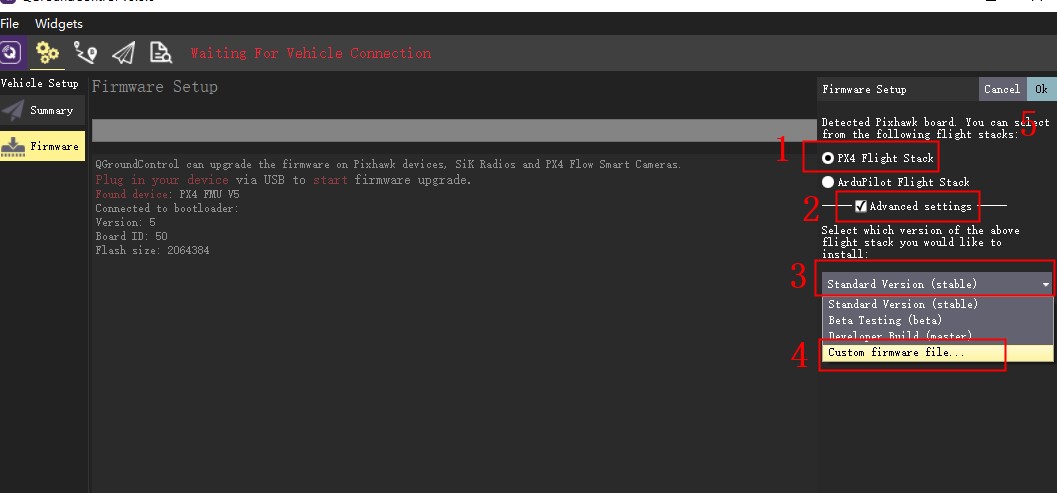
- 加载完成,如不进行操作,十几秒后将自动连接.
Serial映射
| UART | Device | Port |
|---|---|---|
| USART1 | /dev/ttyS0 | GPS |
| USART2 | /dev/ttyS1 | TELEM3 |
| USART3 | /dev/ttyS2 | Debug Console |
| UART4 | /dev/ttyS3 | UART4 |
| UART5 | /dev/ttyS4 | TELEM2 |
| USART6 | /dev/ttyS5 | PX4IO/RC |
| UART7 | /dev/ttyS6 | TELEM1 |
| UART8 | /dev/ttyS7 | GPS2 |
调试接口
PX4系统控制台 和 SWD接口 在 FMU 调试 端口上。
管脚和连接器符合 Pixhawk 连接器标准 接口(JST SM10B 连接器)。
| Pin | Signal | Volt |
|---|---|---|
| 1 (red) | Vtref |
+3.3V |
| 2 (blk) | Console TX (OUT) | +3.3V |
| 3 (blk) | Console RX (IN) | +3.3V |
| 4 (blk) | SWDIO |
+3.3V |
| 5 (blk) | SWCLK |
+3.3V |
| 6 (blk) | SWO |
+3.3V |
| 7 (blk) | NFC GPIO | +3.3V |
| 8 (blk) | PH11 | +3.3V |
| 9 (blk) | nRST | +3.3V |
| 10 (blk) | GND |
GND |
有关接线和使用此端口的信息,请参阅:
- PX4系统控制台 (Note, the FMU console maps to USART3).
- SWD (JTAG)硬件调试接口。
电源模块设置
Pixhawk V6X®套装包含CAN PMU Lite模块,它支持3~14s的锂电池,请把模块的6pin连接器连接到智能控制器Power C1/Power C2接口。
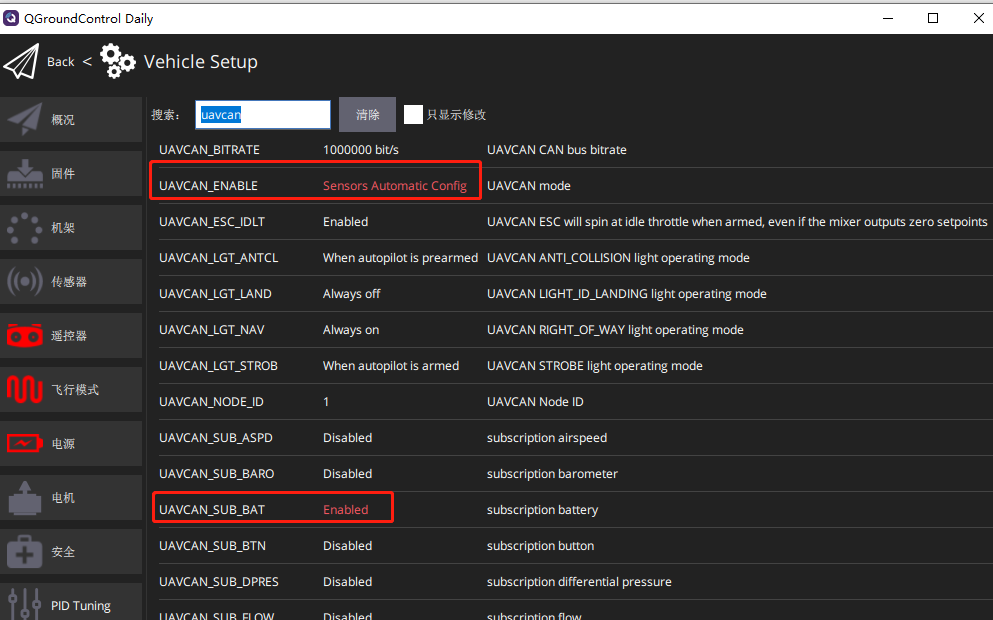
- 连接到QGC地面站》设置》参数设置
- 将UAVCAN_ENABLE参数设置为Sensors Automatic config
- 将UAVCAN_SUB_BAT参数设置为Enabled
- 写入参数并重启
支持的框架类型
常见的多旋翼/固定翼/垂直起降固定翼/无人车或船。 完整的支持配置集可以在 Airframes Reference 中看到。
以太网口配置
Pixhawk V6X支持通过以太网建立局域网链接,局域网内的设备需处于同意IP网络(同一网段)以使每个设备具有唯一的IP地址并且能够与其它设备通信;默认情况下,以太网通过DHCP进行自动分配IP,当DHCP失败时需要自行设置IP。
设置IP地址
- 使用 USB 数据线将飞控连接到计算机。
- 在 MAVLink 控制台>打开 QGroundcontrol >分析工具(Analyze Tools)
- 在 MAVLink 控制台中输入命令(如以下命令)(将值写入配置文件):
echo DEVICE=eth0 > /fs/microsd/net.cfg
echo BOOTPROTO=fallback >> /fs/microsd/net.cfg
echo IPADDR=10.41.10.2 >> /fs/microsd/net.cfg
echo NETMASK=255.255.255.0 >>/fs/microsd/net.cfg
echo ROUTER=10.41.10.254 >>/fs/microsd/net.cfg
echo DNS=10.41.10.254 >>/fs/microsd/net.cfg
- 设置网络配置后,断开USB线并重启控制器。
设置完成后,将在SD卡
/fs/microsd/net.cfg目录中保存配置信息。
DEVICE=eth0
BOOTPROTO=fallback
IPADDR=10.41.10.2
NETMASK=255.255.255.0
ROUTER=10.41.10.254
DNS=10.41.10.254
- DEVICE: 通信接口名称,默认为eth0
- BOOTPROTO: PX4 IP地址的协议,值为fallback(静态地址),dhcp, static, fallback (当DHCP自动分配IP失败时,自动回退到fallback )
- IPADDR:自动驾驶仪IP地址(当BOOTPROTO=fallback有效或者作为备用)
- NETMASK: 网络掩码
- ROUTER: 默认路由的地址
- DNS: DNS服务器的地址
网络连通性测试
- 进入Windows命令窗口
- 输入:ping 10.41.10.2

[!TIP] 有网络延时数据回复则为通信建立,显示通信超时则可能时IP不对或者通信失败。PX4以太网口配置
连接地面站
- 运行QGroundControl地面站软件
- 进行以太网端口配置以传输Mavlink
| 参数 | 值 | GCS显示 | 描述 |
|---|---|---|---|
| MAV_2_CONFIG | 1000 | Ethernet | 配置MAV通过以太网传输 |
| MAV_2_BROADCAST | 1 | Always broadcast | 广播消息 |
| MAV_2_MODE | 0 | Normal | 发送 MAVLink消息的“正常”集(即GCS集) |
| MAV_2_RADIO_CTL | 0 | Disabled | 禁用 MAVLink 流量的软件限制 |
| MAV_2_RATE | 100000 | 100000B/s | 最大发送速率 |
| MAV_2_REMOTE_PRT | 14550 | 14550 | MAVLink 远程端口14550(GCS) |
| MAV_2_UDP_PRT | 14550 | 14550 | MAVLink 远程端口14550(GCS) |
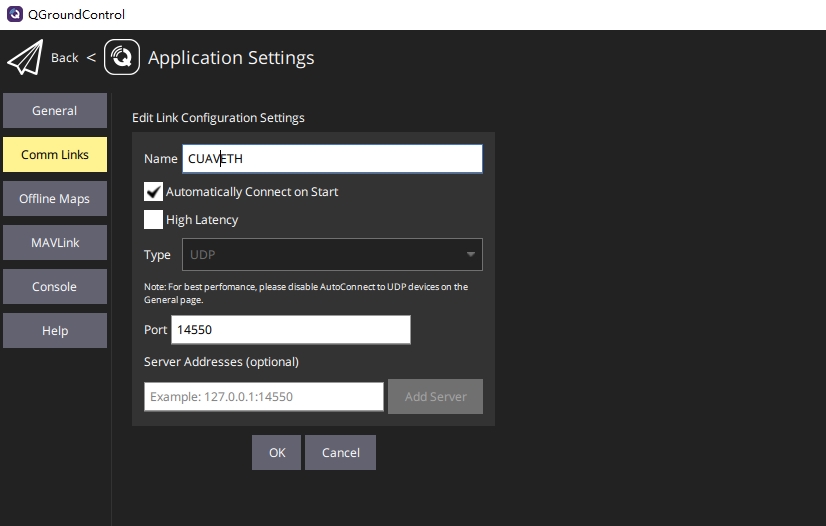
- 新建网络链接(应用设置>Commlinks>添加连接>设置连接名称,连接类型为UDP,端口号为14550,IP地址为控制器IP,点OK确认新建)
- 建立完成后,选择该链接建立通信。
I2C设备
Pixhawk V6X套件中包含一条UART->I2C线材和CAN/I2C转接板,可用于转接I2C设备(如MS5525空速计、LED状态灯等)。
编译固件
[!NOTE] 大多数用户不需要编译固件,直接通过 QGroundControl 在线刷写固件即可。
编译命令
对于 Pixhawk V6X v2
make cuav_fmu-v6x_default
对于Pixhawk V6X
make px4_fmu-v6x_default