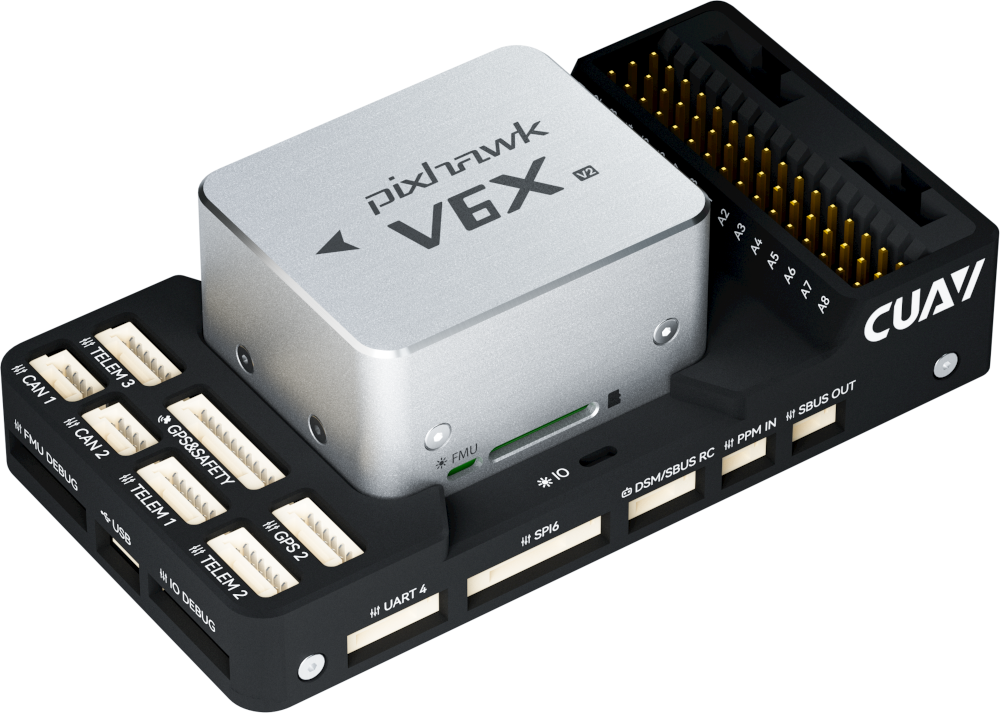
Pixhawk V6X v2智能控制器
Pixhawk V6X v2®是CUAV与PX4打造的新一代Pixhawk;它基于Pixhawk® FMU v6x标准设计,追求极致的安全与稳定;采用H7双精度浮点运算单元及 Cortex®-M3协处理器、独立总线与电源的三冗余IMU、IMU温度工厂预校准技术、双冗余气压计设计,全方位保障无人系统运行安全及丰富的扩展能力;集成百兆以太网PHY,可以通过以太网与任务计算机(机载电脑)、高端测绘相机等无人系统挂载设备进行高速通信,契合高端应用的需求。
[!NOTE] Pixhawk V6X v2为Pixhawk v6x升级迭代版本;两者的载板可以通用,但固件互不兼容。
版本差异
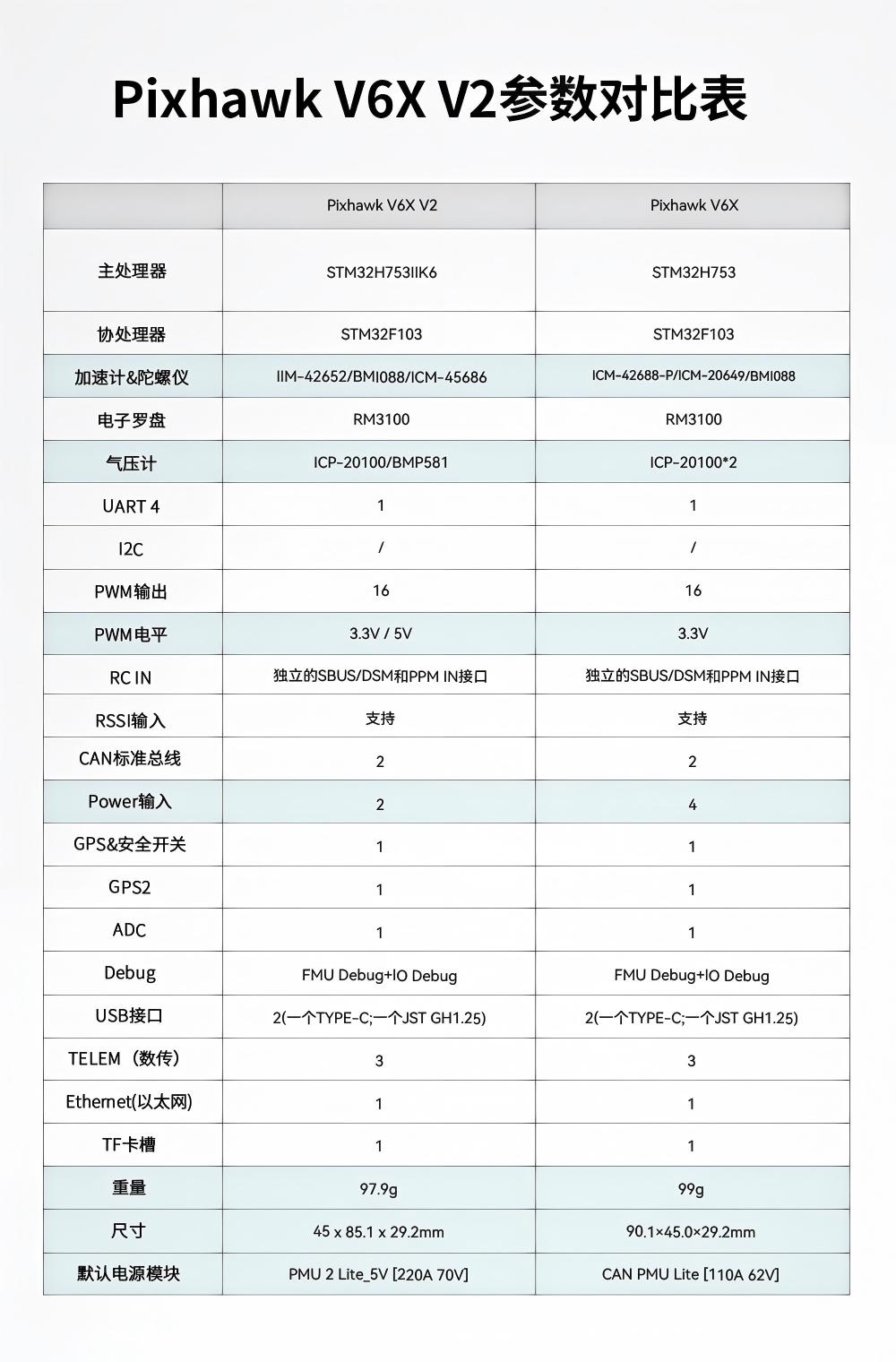
产品参数
| 硬件参数 | |
|---|---|
| 主处理器 | STM32H753IIK6 |
| 协处理器 | STM32F103 |
| 加速计&陀螺仪 | IIM42652/BMI088/ICM-42686 |
| 电子罗盘 | RM3100 |
| 气压计 | ICP-20100/BMP581 |
| 接口 | |
| PWM输出 | 16 |
| POWER | 2个[2个CAN电源接口] |
| GPS接口 | 2个(1个带有I2C和安全开关(GPS1)、一个带有I2C和GPS的接口(GPS2) |
| TELEM(数传) | 3个 |
| CAN | 2个 |
| PPM RC | 1个[PPM接收机专用输入] |
| SBUS/DSM/RSSI | 1个(集成SBUS/DSM/Spektrum输入和RSSI输入) |
| SBUS OUT | 1 |
| FMU DEBUG | 1 |
| IO DEBUG | 1 |
| ETH(以太网) | 1 |
| SPI6 | 1(用于扩展外部传感器) |
| AD&IO PORT | 1(ADC3.3/ADC6.6) |
| UART4 | 1个 |
| USB接口 | 2(一个TYPE-C接口;1个用于USB外接的GH接口) |
| TF卡槽 | 1个 |
| 电源模块 | 标配PMU 2 lite-5V版本 【输入范围:12-70V】 |
| 工作环境及物理参数 | |
| 工作电压 | USB:4.75 ~ 5.25 V PMU 2 Lite:12~70V POWER:4.85 ~ 5.45V |
| 伺服输入 | 0 ~ 9.9v |
| 工作温度 | -20°~85° |
| 重量 | 控制器总重:97.9g Core:43.1g, 载板(含螺丝):54.8g) |
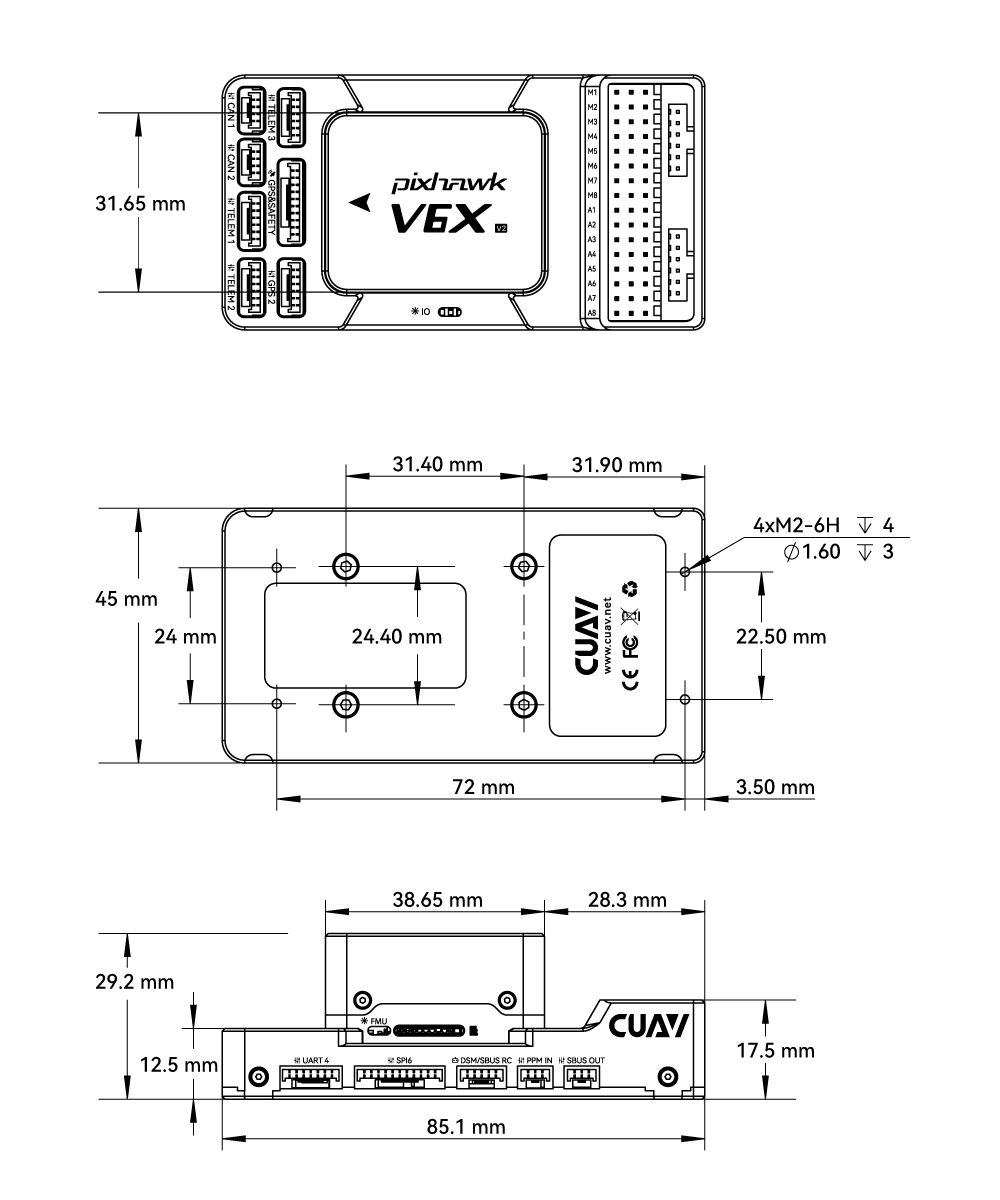
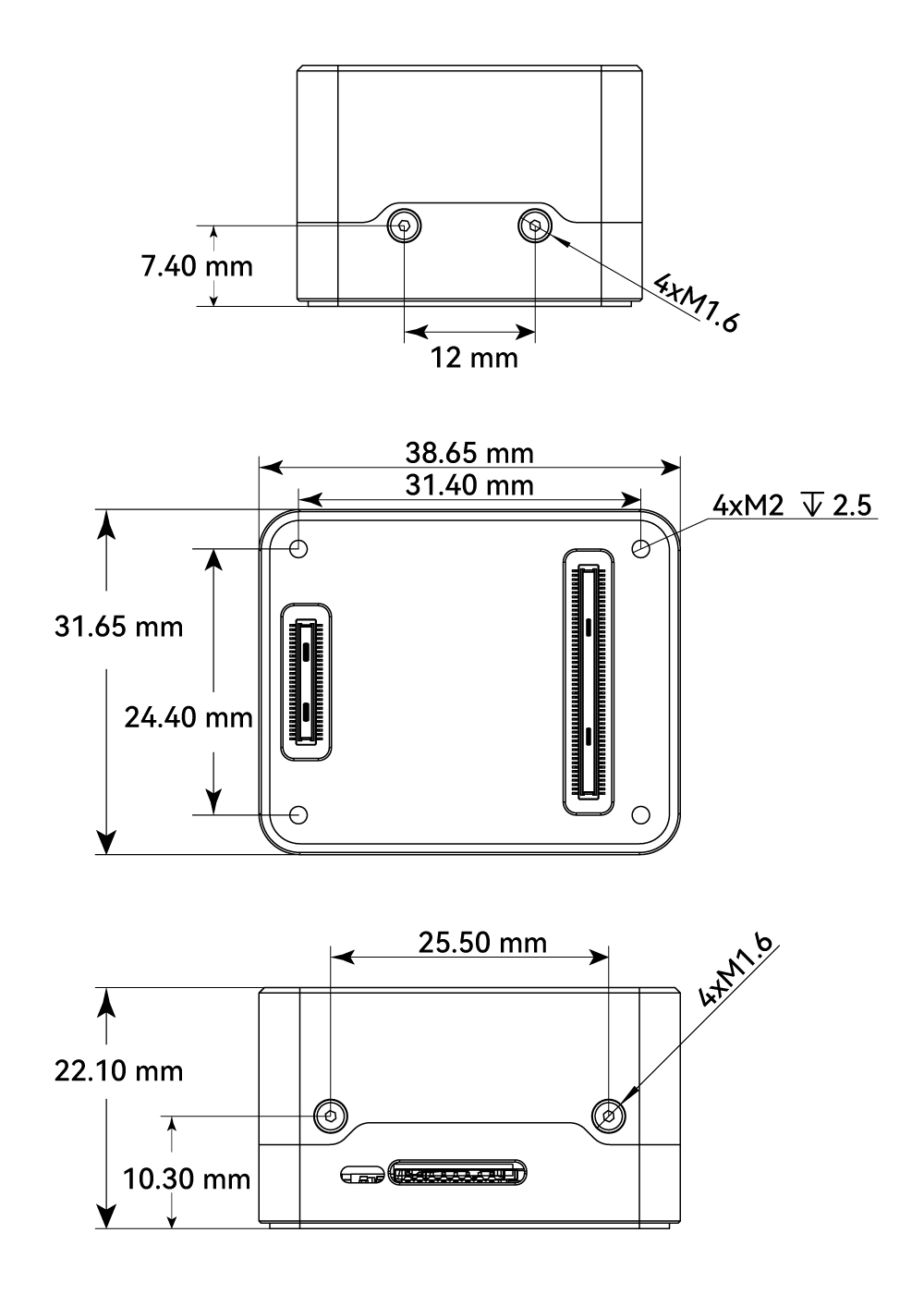
尺寸
控制器
CORE
采购
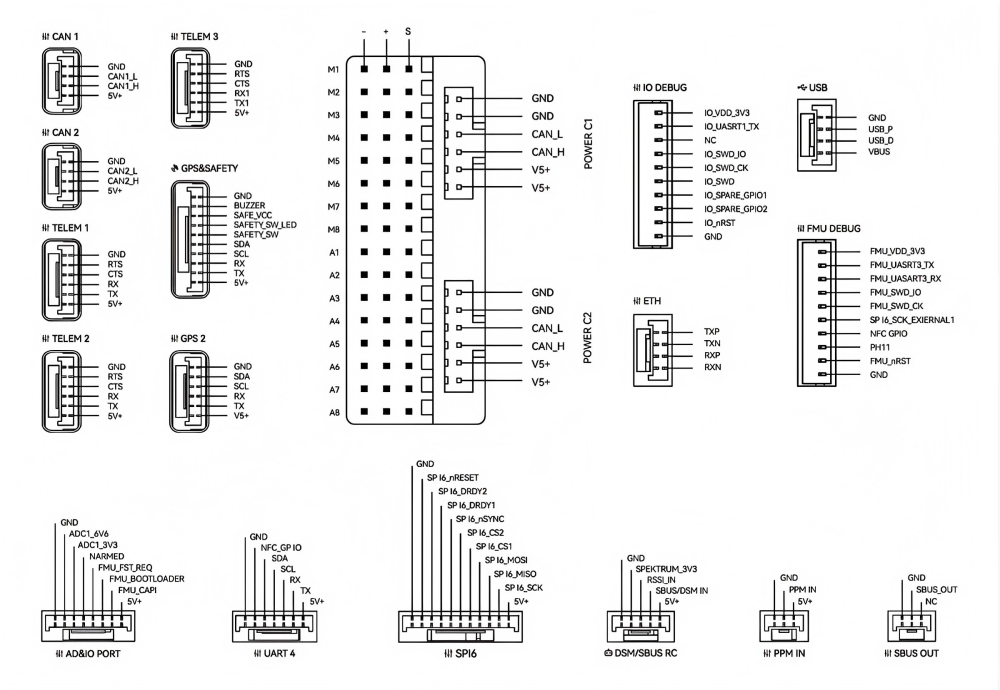
引脚定义