C-RTK2快速入门
本节介绍了如何快速配置和使用C-RTK 2。
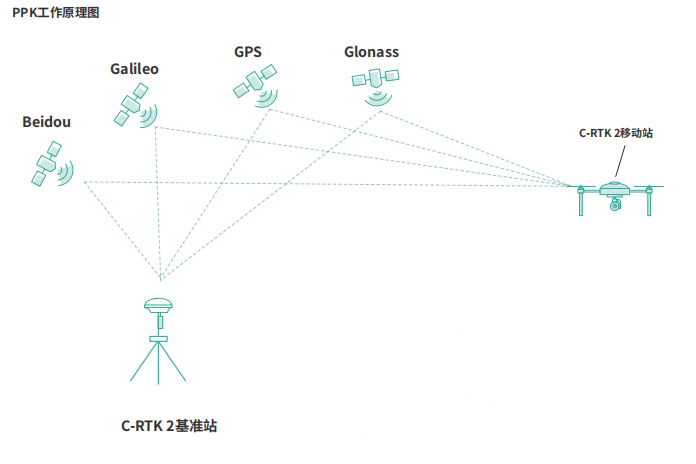
系统搭建
根据您的不同的需求,您需要先准备以下不同的设备
单独PPK
- PPK基准站/Ntrip账号 *1
- C-RTK 2套装*1
- 测绘相机*1
- 无人机*1
PPK+RTK

- PPK基准站/Ntrip账号 *1
- C-RTK 2套装*1
- 测绘相机*1
- 无人机*1
- 数据链路*1
- 电脑*1
C-RTK 2作为RTK基准站和移动站,以及PPK移动站,不建议作为PPK基准站。
硬件连接
根据不同的相机类型,有不同的连接方式
五镜头测绘相机/DIY方式
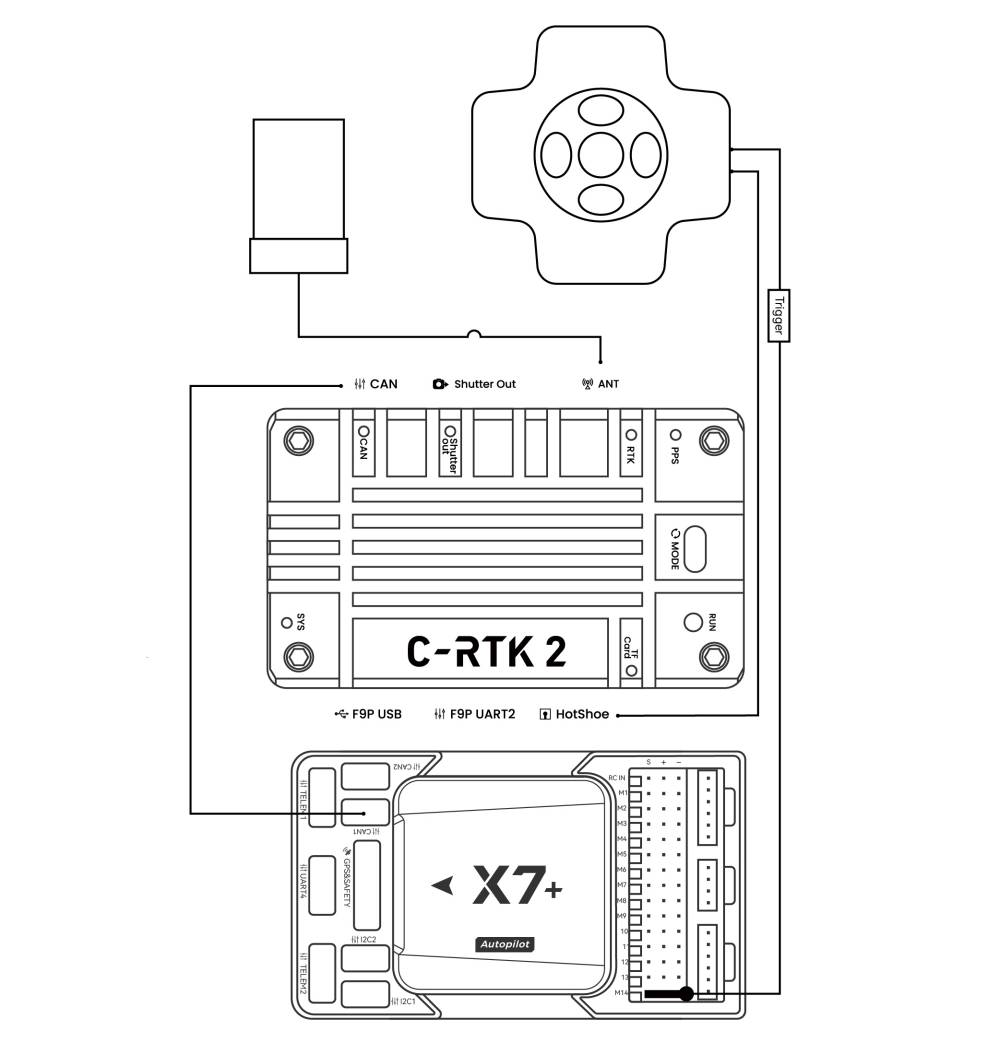
- 使用can连接线连接飞控和C-RTK2的CAN(通信和供电)
- 使用热靴线连接到五镜头相机的热靴线
- 飞控的快门触发引脚连接到五镜头快门线
佳能/索尼相机等带热靴相机
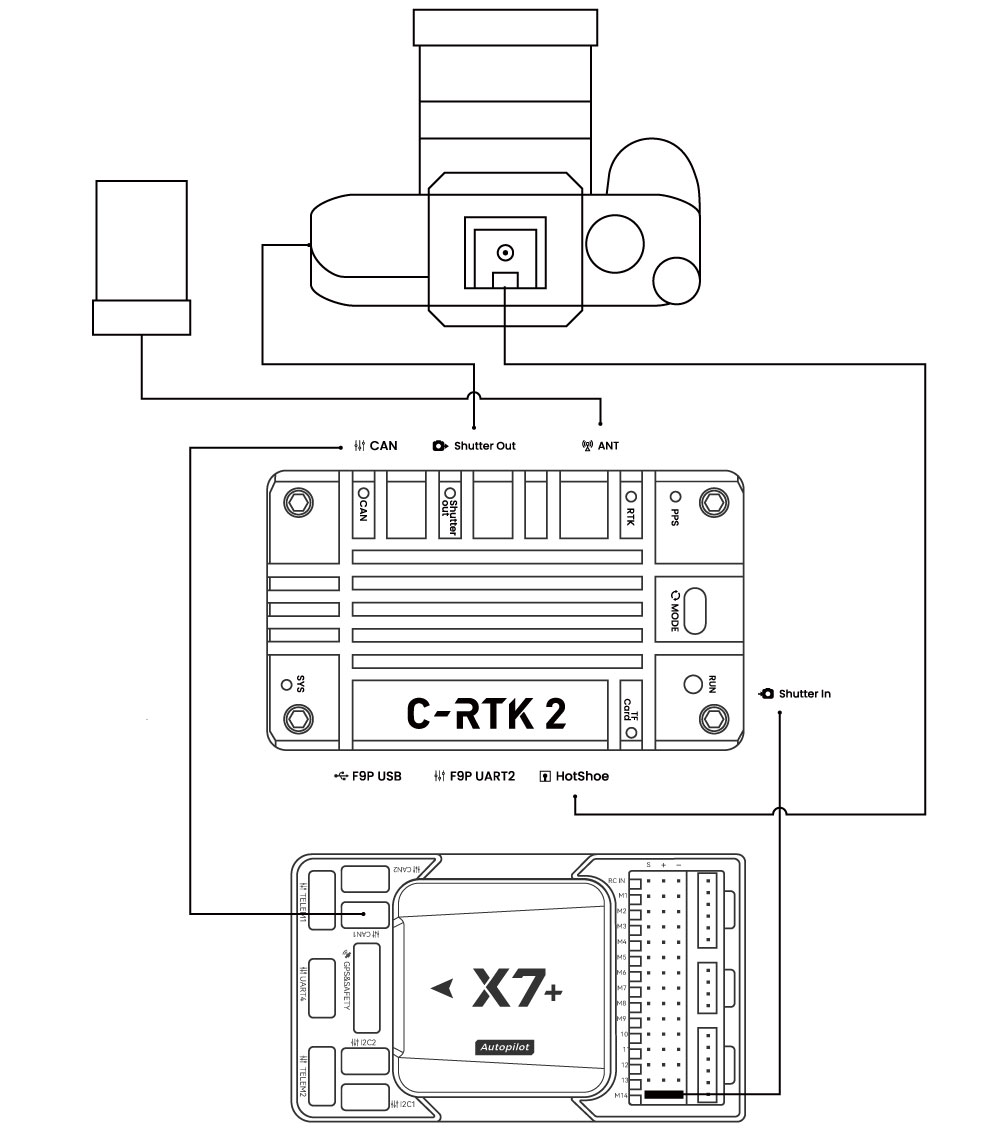
- 使用can连接线连接飞控和C-RTK2的CAN(通信和供电)
- 使用热靴线连接到相机的热靴PCB和C-RTK Hotshoe接口,PCB插入相机闪光灯接口
- 飞控的快门触发引脚连接到Shutter in接口(如果使用外部触发器可以不连接,使用外部触发器即可)
- C-RTK2 Shutter out连接到相机快门接口(如果使用外部触发器可以不连接,使用外部触发器即可)
以上为推荐使用方式,您也可以搭配无热靴反馈的相机使用,采用快门触发记录POS;但您可能需要容忍因延时导致的精度误差。
无热靴相机(快门触发记录pos)
对于一些特殊的无热靴反馈的相机,C-RTTK支持使用快门触发记录POS;但因各种原因,相机拍照与POS记录时间存在误差(延时);可能会影响航测精度;使用该方式时需将C-RTK 2参数CAM_FEEDBACK_TYPE设置为0。
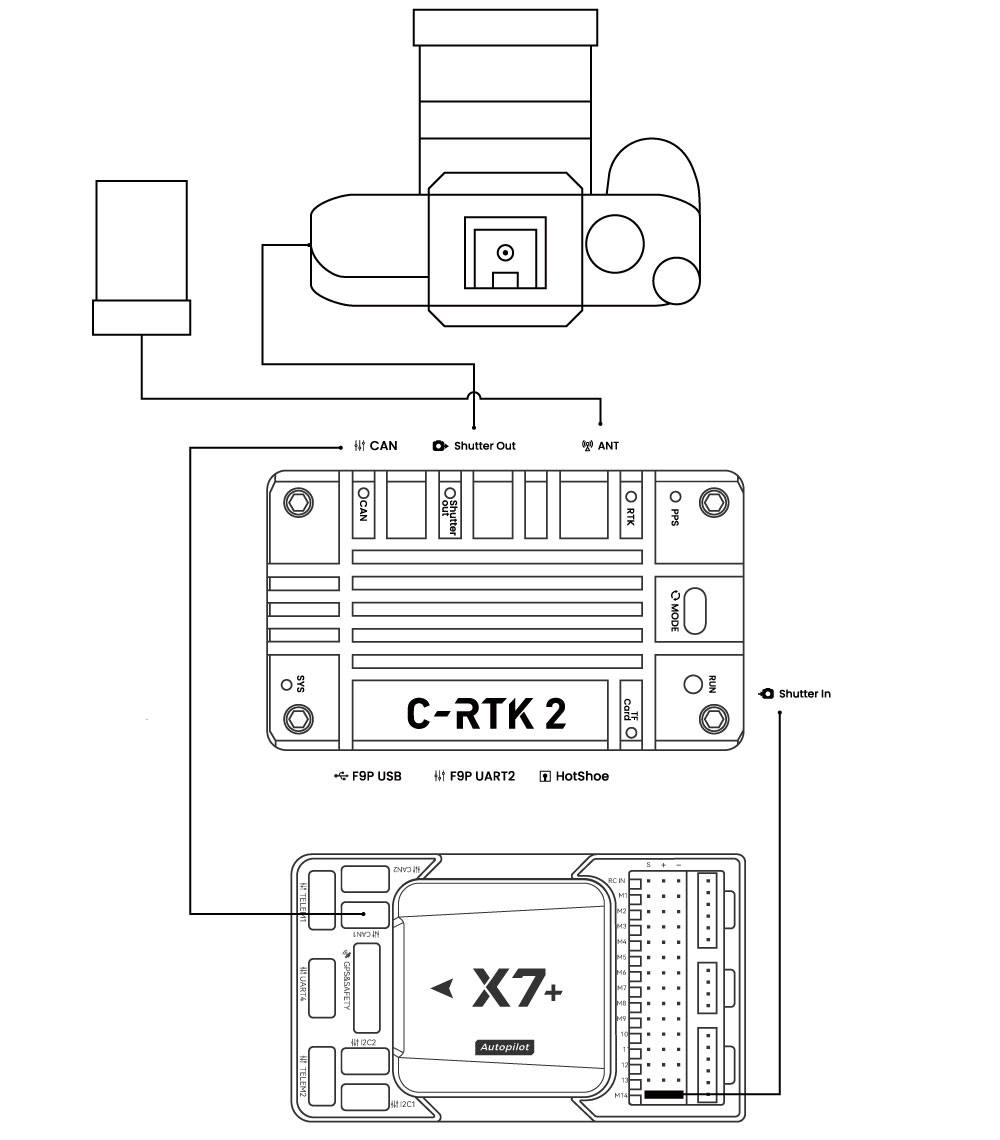
- 使用can连接线连接飞控和C-RTK2的CAN(通信和供电)
- 飞控的快门触发引脚连接到Shutter in接口
- C-RTK2 Shutter out连接到相机快门接口
安装
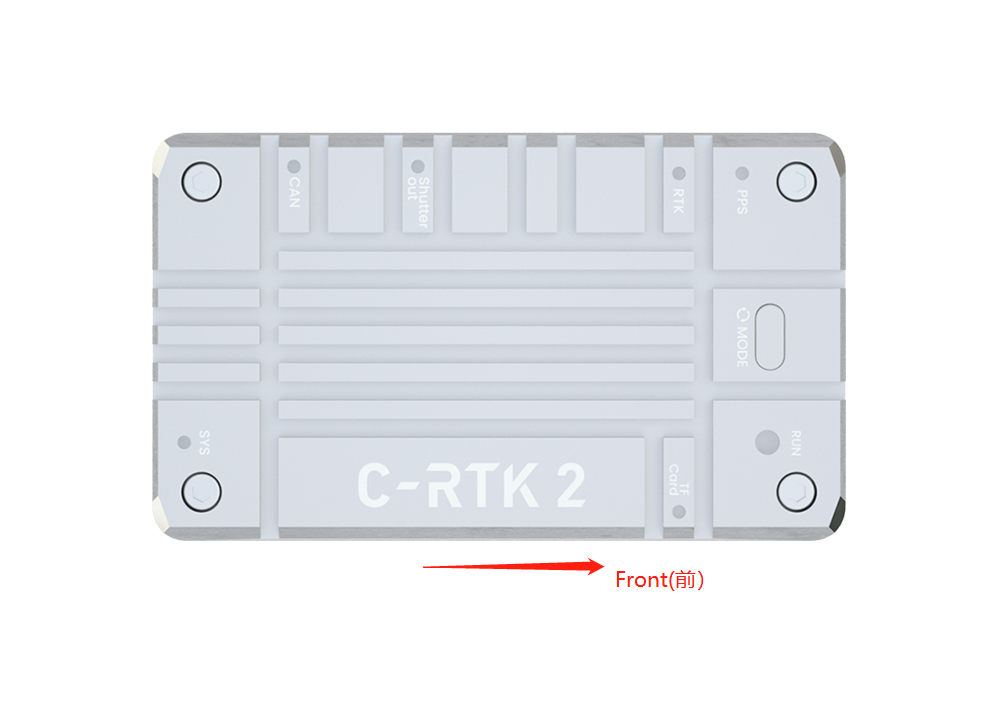
一般情况下需将设备的方向与机头方向一致;否则您可能需要额外配置飞控参数。
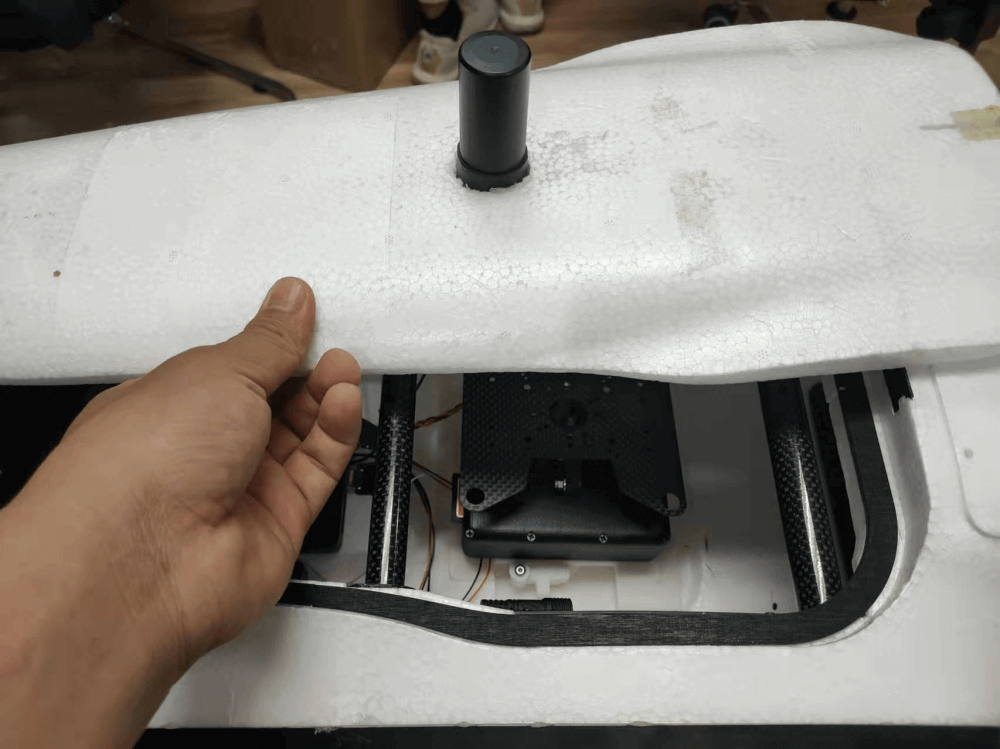
建议将C-RTK2天线安装在相机正上方,可以免除配置天线偏移量。
飞控参数配置
根据飞控固件的不同,设置的参数有所差异,以下为ArduPilot/PX4固件的设置指南,如您使用其它飞行控制器请查阅相关控制器快门设置指南;以下配置以常见的继电器/电平快门触发为例;也支持以PWM快门触发。
ArduPilot固件
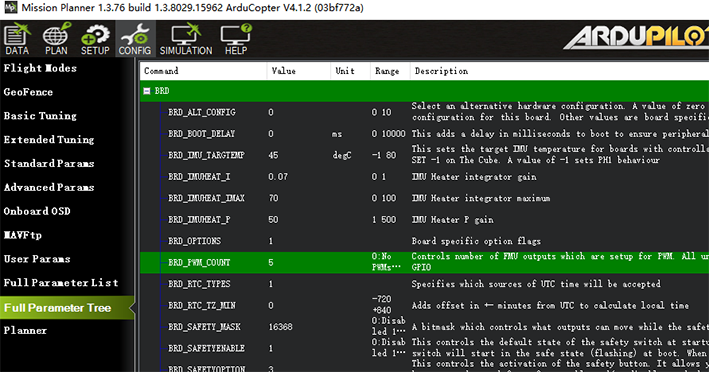
飞控参数设置在MissionPlanner》配置》全部参数表/参数书中,修改后请点击右侧写入按钮,并重启飞控。
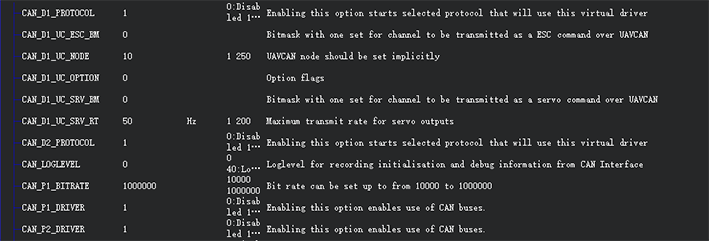
启用UAVCAN
NOTE 以下设置为启用UAVCAN,为飞控提供RTK/导航数据;如果您仅仅将C-RTK 2作为PPK使用,无需进行此项操作。
- CAN_D1_PROTOCOL =1
- CAN_P1_DRIVER =1(开启CAN1口驱动)
- CAN_D2_PROTOCOL =1
- CAN_P2_DRIVER =1(开启CAN2口驱动)
- GPS_TYPE =9或者GPS_TYPE2= 9(启用CAN GPS)
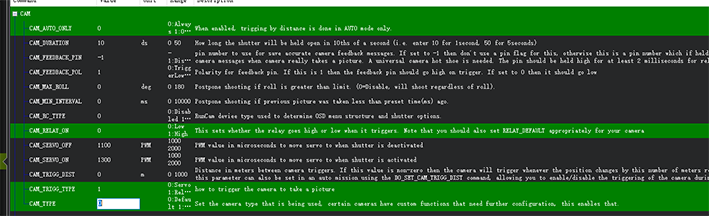
设置飞控快门触发
以飞控AUX6/A6/M14引脚作为快门触发引脚为例
- CAM_TRIGG_TYPE=1(0=PWM舵机信号,1=继电器信号)
- CAM_RELAY_ON=0(继电器触发是什么电平,0=低电平,1=高电平)
- CAM_MIN_INTERVAL=0(快门触发最短间隔时间,单位:毫秒,1000=1秒)
- CAM_MAX_ROLL=0(如果倾斜超过这个角度,将延时拍摄直到角度恢复正常才触发,0=不限制)
- CAM_AUTO_ONLY=0(什么时候可触发快门,0=任何时候,1=仅在AUTO模式下)
- BRD_PWM_COUNT=5(AP4.10以下版本固件,更高的版本无需设置;应比引脚序号更小;比如X7系列设置为13)
- Relay_pin=55(继电器引脚,X7系列设置为63)
测试快门触发
- 使用遥控器触发:
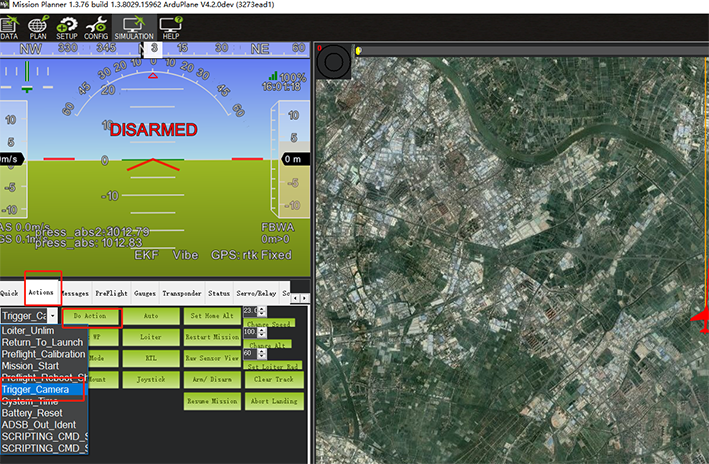
RC7_OPTION=9(?=遥控器快门触发通道,例如RC7_OPTION=9则遥控器通道7拨到高位就拍照,范围RC6~RC12). - 使用地面站触发:
在地面站的飞行数据的动作栏,选择Trigger_camera,点执行动作就可以触发拍照.
PX4固件
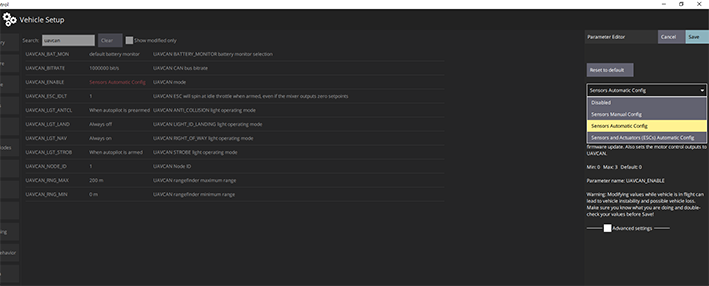
飞控参数设置在QGroundcontrol》参数,修改后请点击右侧ok按钮,并重启飞控。
使能UAVCAN
NOTE 以下设置为使能UAVCAN,为飞控提供RTK/导航数据;如果您仅仅将C-RTK 2作为PPK使用,无需进行此项操作。
- UAVCAN_ENABLE=Sensors Automatic Config(自动配置节点iD)
设置飞控快门触发
- TRIG_MODE=1(触发模式,4种模式可选)
- TRIG_INTERFACE=1 (电平/继电器触发)
- TRIG_PINS=?(触发的引脚。如果在AUX5和AUX6触发,设置值应该是56)
- TRIG_ACT_TIME=200(相机输出持续时间,单位ms)
- TRIG_POLARITY=0(触发极性,一般是低电平触发)
C-RTK2参数
使用电平或继电器触发快门时一般不需要配置C-RTK2;当无法触发相机拍照时,请检查以下配置
- UAV_ENABLE=1(使能相机快门输入)
- UAV_MODE=0(继电器输入模式)
- UAV_POLARITY=0(快门输入的触发电平;与飞控TRIG_POLARITY/CAM_RELAY_ON相关)
- CAM_DURATION=10(快门打开时间)
- CAM_POLARITY=0(快门输出口的电平,与相机有关,一般为0)
- CAM_FEEDBACK_TYPE=1(pos记录触发方式,热靴设置为1,快门设置为0)
- CAM_ST=0(快门补偿时间,使用热靴时设置为0)