Users guide for ArduPilot
This chapter describes the setup and configuration required to use the C-COMPASS application with a controller running ArduPilot firmware.
Enable Compass.
Run QGroundControl ground station > Vehicle setup > Parameters interface, enter "UAVCAN" to find and set the following parameters.
UAVCAN_ENABLE = Sensors Automatic Config
UAVCAN_SUB_MAG = Enabled
Calibrate compass
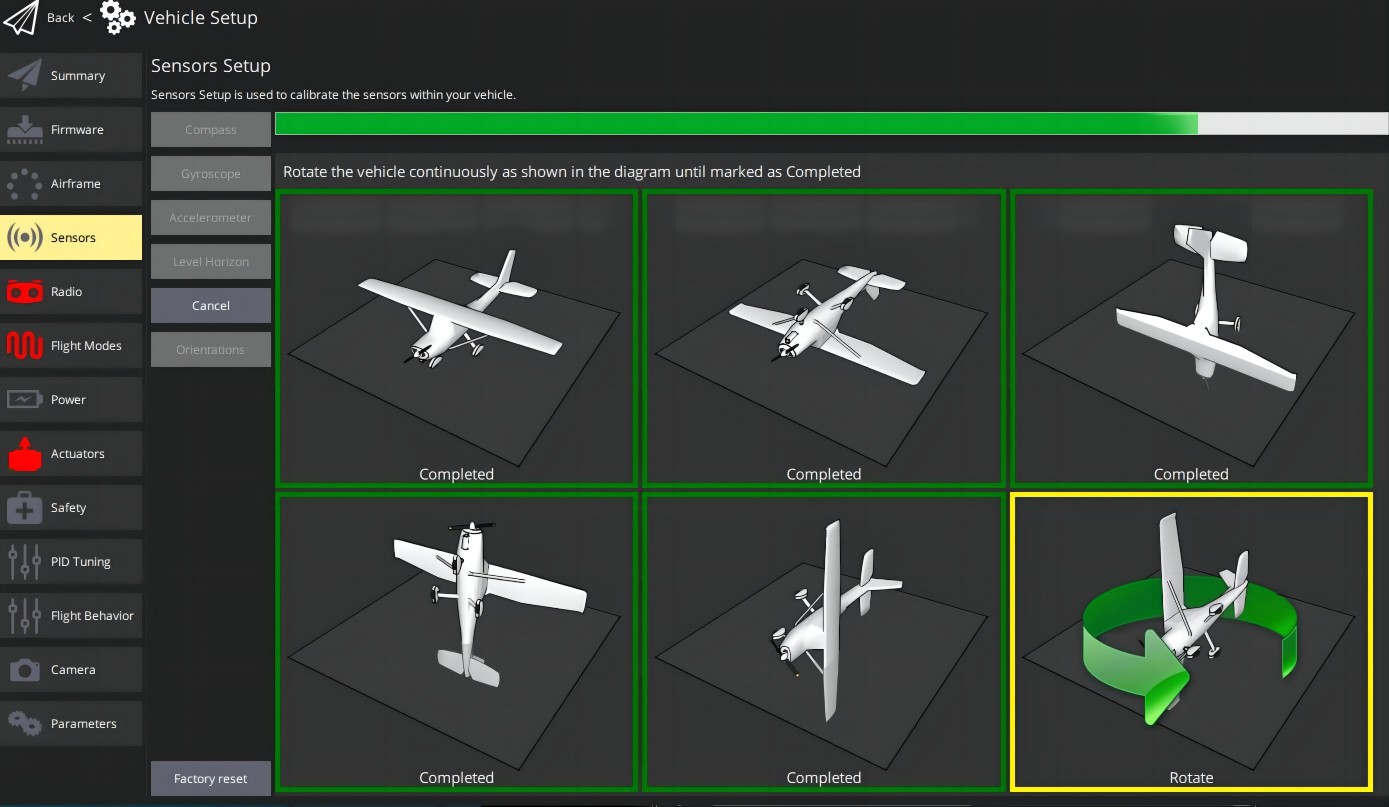
- Go to the "Sensors > Compass" page for the visual indicators for calibration.
[TIP] Calibrating the magnetometer requires installing the controller and magnetometer in the vehicle and not moving it until the calibration is complete. For larger vehicles, you can unmount the arm or wing to make it easier to perform the calibration (with the compass away from the arm or wing).