C-Compass使用指南(PX4)
本章设置和配置适用于将C-COMPASS应用于运行ArduPilot固件的控制器。
启用罗盘
运行QGroundControl地面站>Vehicle setup>Parameters界面输入"UAVCAN"找出并设置以下参数。
UAVCAN_ENABLE = Sensors Automatic Config
UAVCAN_SUB_MAG = Enabled
校准罗盘
- 进入“Sensors>compass”界面图像指示校准
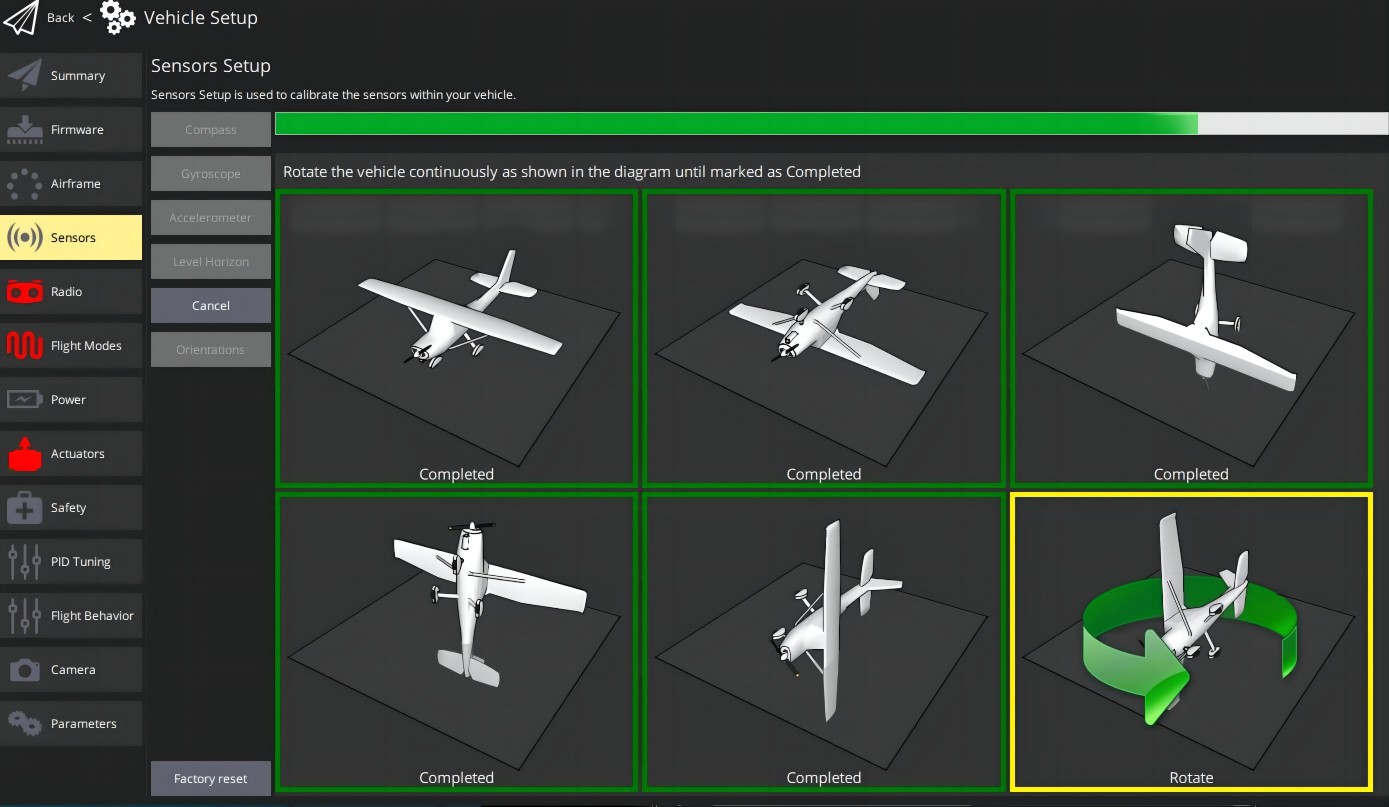
[!TIP] 校准磁力计需要将控制器与磁力计安装到载具中,校准完成后请勿移动它,对于大型的载具中,可不安装机臂或机翼以便轻松执行校准(罗盘远离机臂或机翼)。