C-COMPASS使用指南
本章设置和配置适用于将C-COMPASS应用于运行ArduPilot固件的控制器。
启用罗盘
运行MissionPlanner并进入Config>FULL Parameter List界面
//如果连接到CAN1
CAN_P1_DRIVER = 1
//如果连接到CAN2
CAN_P2_DRIVER = 1
罗盘设置界面详解
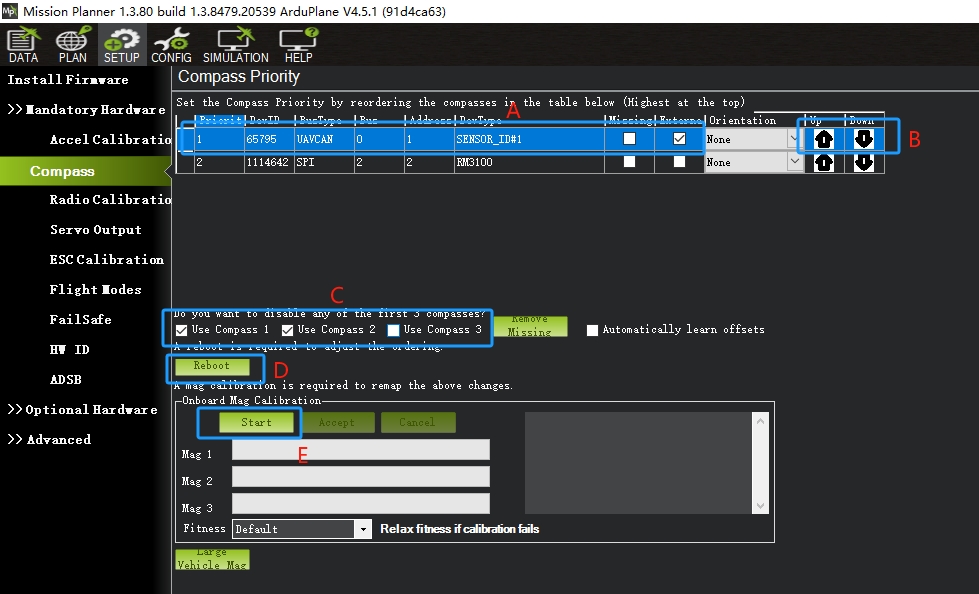
- A:磁力计信息栏,对于C-COPMASS,BUS类型为UAVCAN,Externa(外置)。
- B:可通过点击上下箭头调整罗盘排序,排序第一个为优先级最高的。
- C:选择哪些磁力计需要参与校准(不勾选则不使用也不参与校准)。
- D:当调整了磁力计排序后,需要点击Reboot,重启控制器。
- E:点击开始执行罗盘校准。
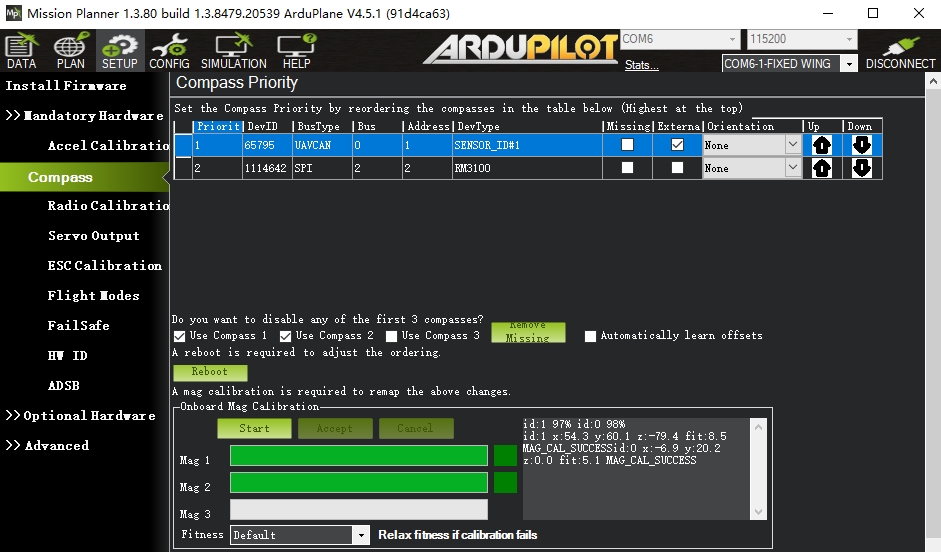
开始校准
- 点击“start"按钮,开始进行校准操作
- 将载具以“球状”进行环绕旋转,直至校准结束
- 如下图所示,系统提示校准完成
[!TIP] 校准磁力计需要将控制器与磁力计安装到载具中,校准完成后请勿移动它,对于大型的载具中,可不安装机臂或机翼以便轻松执行校准(罗盘远离机臂或机翼)。