Usage Guide for Ardupilot
This guide mainly describes how to use SKYE2 with Ardupilot.
[!Tip] SKYE2 supports Ardupilot 4.30 and above firmware.
Flight controller parameter settings
Open Mission planner>Configuration>All parameter table; set the following parameters and save and then restart
- CAN_P1_DRIVER=1
- CAN_P2_DRIVER=1
- CAN_D1_PROTOCOL=1
- CAN_D2_PROTOCOL=1
- ARSPD_TYPE=8
- ARSPD_USE=1
- ARSPD_AUTOCAL=1
Calibrate airspeed offset
When there is no wind and the airspeed display is greater than 3m/s, please perform airspeed offset calibration before takeoff.
- Run the Mission planner software and connect the flight controller
- Make sure the pitot tube is in a windless environment
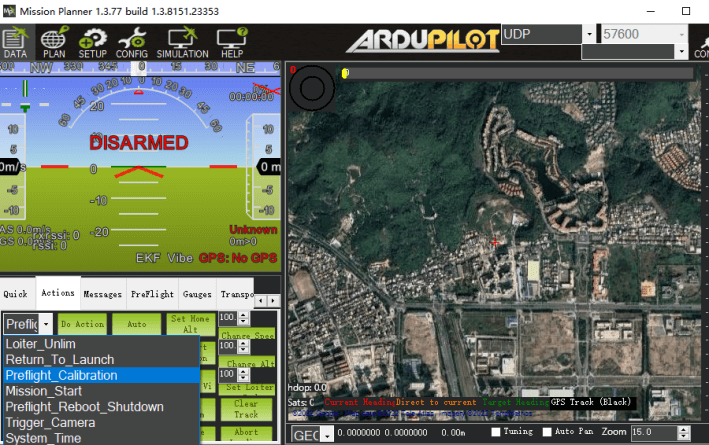
- Open Mission planner>Flight data>Action bar
- Select "Preflight Calibration" in the first check box; click the "Perform Action" button on the right
Pre-flight inspection
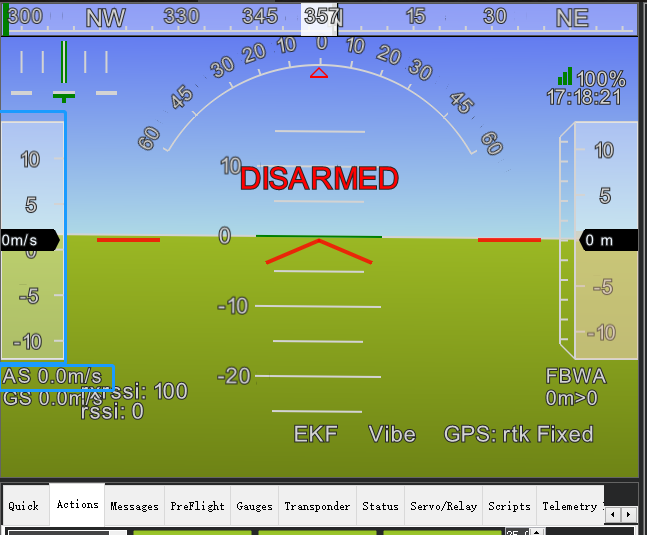
Before flying, please connect to the ground station to check that there is no wind and ensure that the airspeed value is within the range of 0~3m/s (if it exceeds the range, need perform airspeed offset calibration)
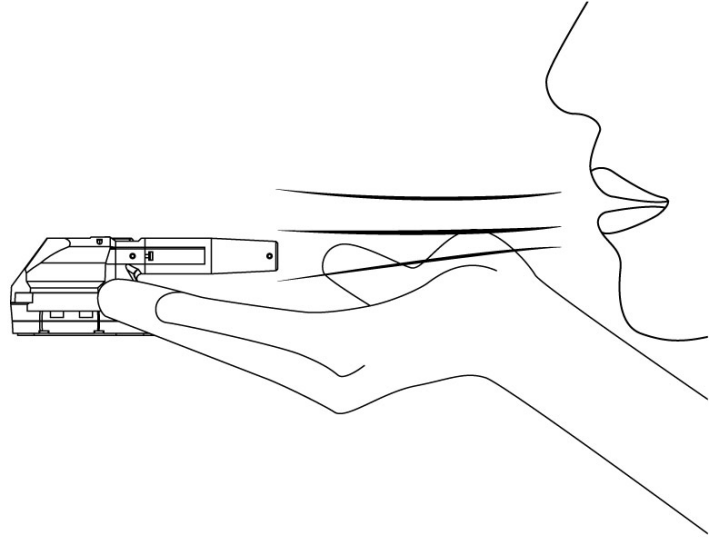
- Hold the pitot tube with your hand and blow air into the pitot tube. If the airspeed value changes according to the airflow speed, the inspection is complete.
空速校准
Airspeed Calibration
[!NOTE] Different installation methods and airspeed sensor scale factors will be different. The airspeed indicator needs to be calibrated on the first flight.
//Enable automatic airspeed calibration - ARSPD_AUTOCAL=1
Perform calibration (choose one of the following two methods):
- Take off in QStabilize or QLoiter multi-axis mode and switch to FBWA (self-stabilizing A mode) to control the drone to fly and hover for about 5 circles. After the ground station message bar prompts that the calibration is completed, execute the landing.
- If you don’t know how to fly in FBWA mode, you can fly with the airspeed sensor enabled but without it (ARSPD_USE=1; ARSPD_TYPE=8; do not do this in an environment with high wind speed); The aircraft will fly at ground speed (relative to ground speed). After takeoff, it will circle in Loiter mode for about 5 circles. The ground station message bar will prompt that the calibration is completed before landing.