CAN PDB Configuration Guide(ArduPilot)
This chapter is applicable to using CAN PDB with ArduPilot flight stack (flight control running ArduPilot firmware).
Enable voltage and current monitor
To enable voltage and current detection, you need to set the autopilot parameters, connect the flight controller to the MissionPlanner ground station, set the following parameters in FULL parameter List, and restart the autopilot after writing:
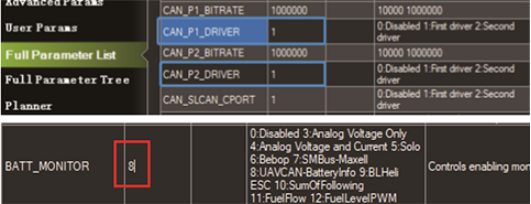
CAN_P1_DRIVER set to 1
CAN_P2_DRIVER set to 1
BATT_MONITOR set to 8
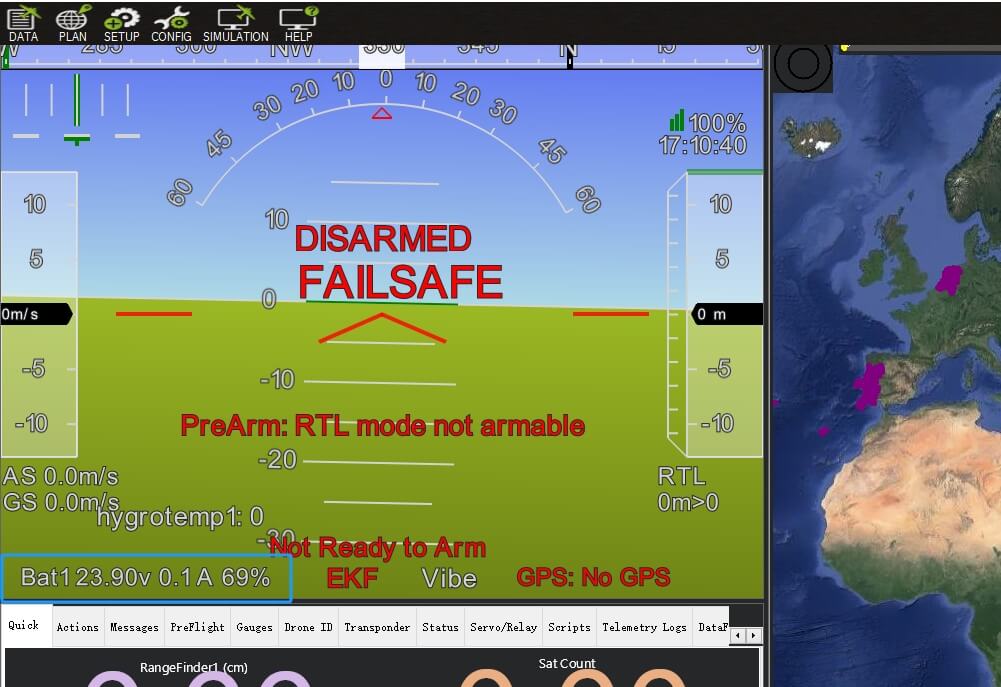
View power information
Parameter
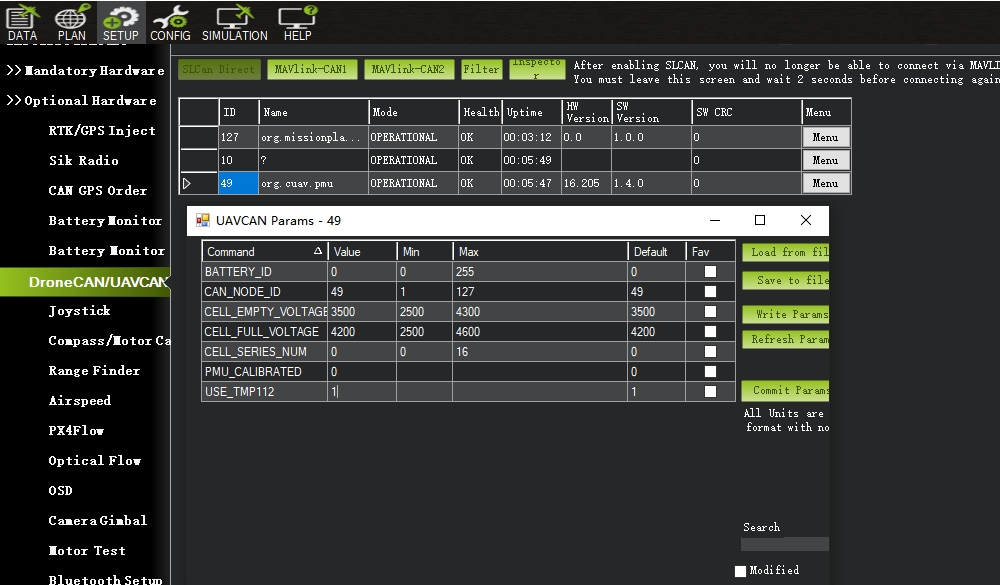
CAN PDB provides 7 parameters for users to set.
BATTERY_ID // invalid
CAN_NODE_ID //CAN ID
CELL_SERIES_NUM //The number of battery cells, the default is 0 (autonomous identification), used to estimate the battery percentage.
CELL_FULL_VOLTAGE //The full-charge voltage of a single battery cell, used to estimate the battery percentage.
CELL_EMPTY_VOLTAGE //The empty voltage of a single cell is used to estimate the battery percentage.
CALIBRATION_PARAM //Calibration status identifier. If the value is 1, it has been calibrated (read only and cannot be written).
USE_TMP112 //Temperature sensor, default is 1 (on), set to 0 to turn it off.
[!NOTE] The default parameters can meet the needs of most users, do not modify them unless necessary.
Change parameters
Connect the autopilot to the Mission planner ground station, open the Configuration > Optional Hardware > Dronecan/UAVCAN setting interface; click "mavlink-can1" (if connected to CAN1); find the CAN PMU information bar.
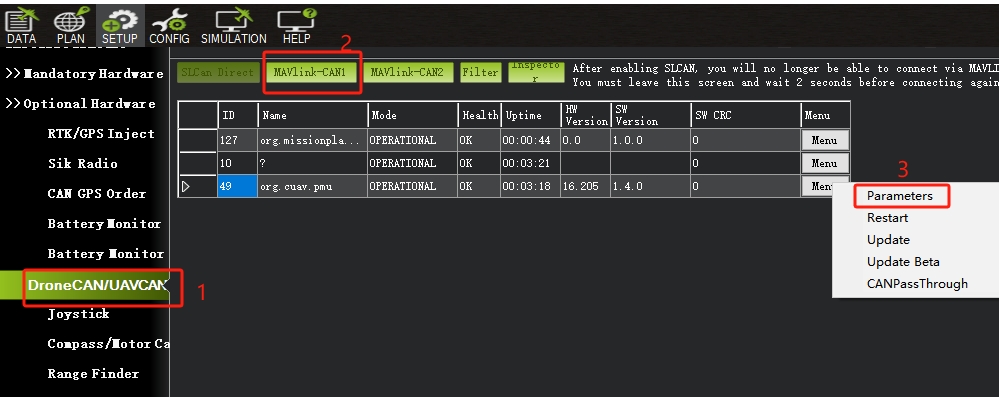
Find the parameter settings that need to be modified, save them, and then restart.
High voltage battery settings
Take a 6S battery pack with a battery cell full charge of 4.35v and an empty voltage of 3.3v as an example.
Set the following parameters in the CAN PDB parameter table:
CELL_SERIES_NUM=6
CELL_FULL_VOLTAGE=4350
CELL_EMPTY_VOLTAGE=3300
Click "write params (write parameters)" and restart.