CAN PDB多功能自动驾驶仪载板
CAN PDB是CUAV自主研发的自动驾驶仪载板。它别出心裁地将飞行控制器的载板与配电板的功能结合在一起。当与CORE结合时,它可以为无人机/无人车/无人船等多种类型设备提供自动驾驶功能,并同时提供10路冗余主电源,多种电压输出。
无论是电路设计还是硬件做工用料,CAN PDB都是飞行控制器载板与配电板中的佼佼者。得益于超厚铜和加厚镀锡PCB可以为任意设备提供高达110A的持续工作电流。自研的TTI算法实现媲美精密仪器的0.1A电流、0.05V电压测量精度。

产品特色:
1.可调式伺服电压输出(5V/7.4V/8.2V),可为无人系统常用规格的舵机供电。
2.物理K1开关实现5V和3.3V PWM信号输出切换,提高PWN抗干扰能力。
3.支持14~62V超宽电压输入。
4.精准测量电压电流,110A内电流准确度0.1A,电压准确度0.05V。
5.Droncan智能电源管理系统,智能监测电池电量、电压及电流。
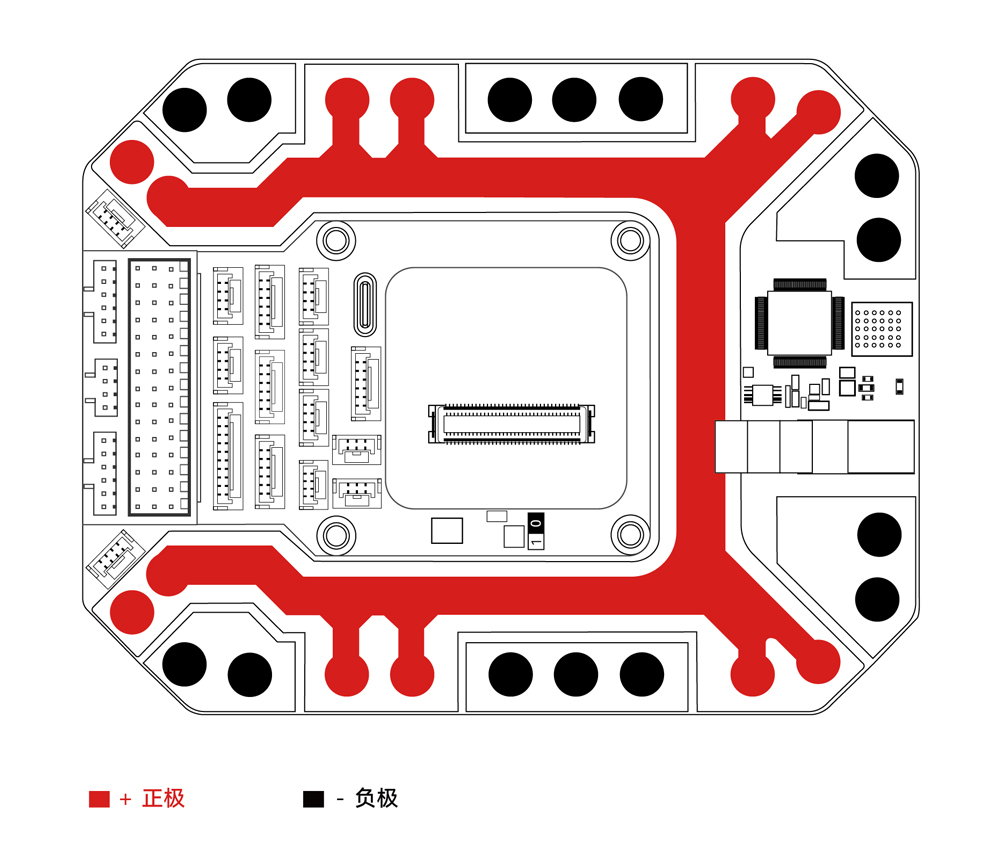
6.超厚铜和加厚镀锡PCB,有效减小大电流下电路内阻引起的发热。
7.超低压降10路主电源输出。
8.运行TTI算法,提升各种温度下电源检测的精准度。
数据表
| 数据表 | |
|---|---|
| 处理器 | STM32F4 |
| 输入电压 | 14-62V(4-15S Lipo) |
| 测量电流范围 | 0-110A |
| 最大输出功率 | 6000W(持续120s) |
| 最大稳定输出功率 | 5500W |
| Core | V5+/X7/X7 Pro/X7+/X7+ Pro |
| 机型 | 固定翼/VTOL垂直起降固定翼/3-12轴多旋翼/ 直升机/无人车/无人船等 |
| 支持固件 | ArduPilot 4.0.0及以上版本 Px4原生固件1.11.0及以上版本 |
| 工作温度 | -20~+100℃ |
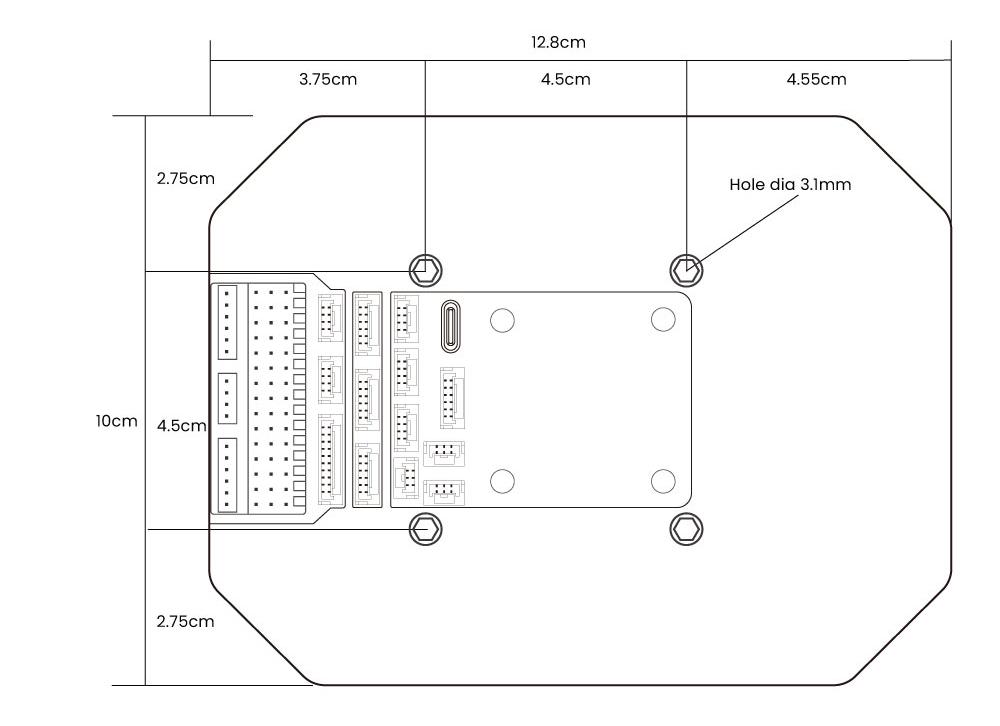
| 尺寸 | 12.8cm(长)×10cm(宽)×1.2cm(高) (安装X7+/X7+PRO后高度是4.5cm 安装V5+后高度是3.9cm) |
| 重量 | 200g(含线材) |
| 线材长度 | 30cm |
| 接口 | |
| V_OUT | 5V(默认)/7.4V/8.2V(最大支持4A负载) |
| Servo VCC | 5V(默认)/7.4V/8.2V(最大支持8A负载) |
| 12V OUT | 最大4A |
| USB | 1 |
| UART1 | 5(gps/uart4/telem1/telem2/debug) |
| CAN | 2 |
| I2C | 3 |
| SBUS/DSM IN | 1 |
| PPM IN | 1 |
| Servo(伺服) | 14 |
| ADC3.3 | 1 |
| ADC6.6 | 1 |
| SBUS outs | 1(当使用X7+/X7+pro core时该接口无效) |
| RSSI | 3.3V模拟电压 |
| DSU7 | 1 |
尺寸
电源LED状态灯
- 绿色闪烁:每节电池电压4.0~4.3V
- 黄色闪烁:每节电池电压低于4.0V但高于3.7V
- 红色闪烁:每节电池电压低于3.5v
[!NOTE] 依据初始电压判别电池节数,当您上电时每节LiPo电压低于3.7V,可能会误判电池节数。
接口定义
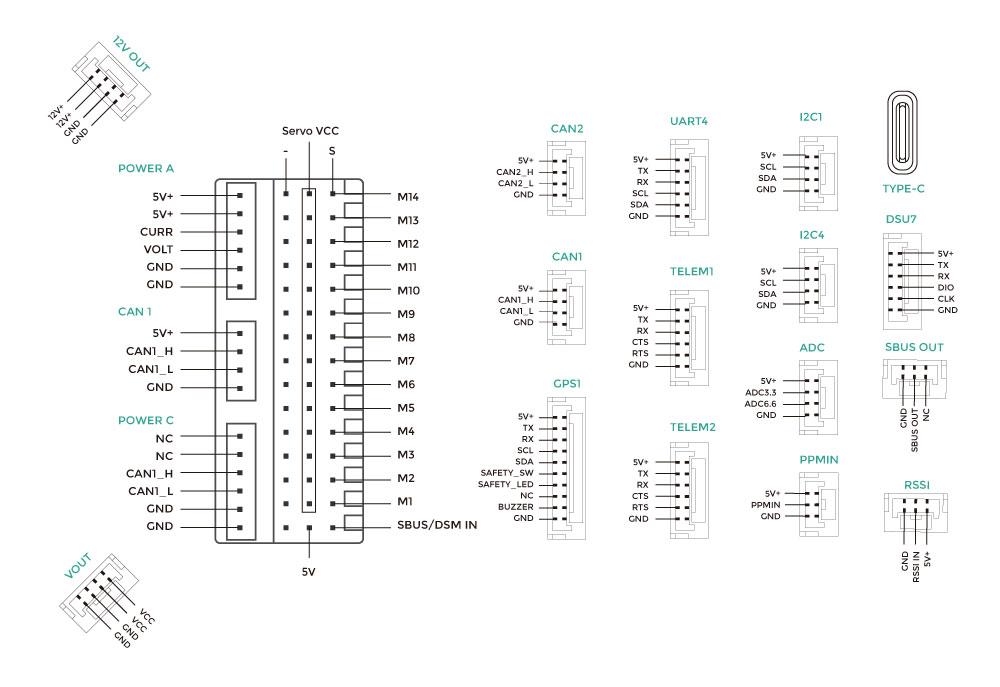
[!TIP] 引脚定义图与实物接口布设方向一致。
VOUT与Servo VCC
如果您需要CAN PDB为固定翼舵机等设备供电,请焊接JP1,它将连通VOUT电路,从而获得5V/7.4V/8.2V电源。
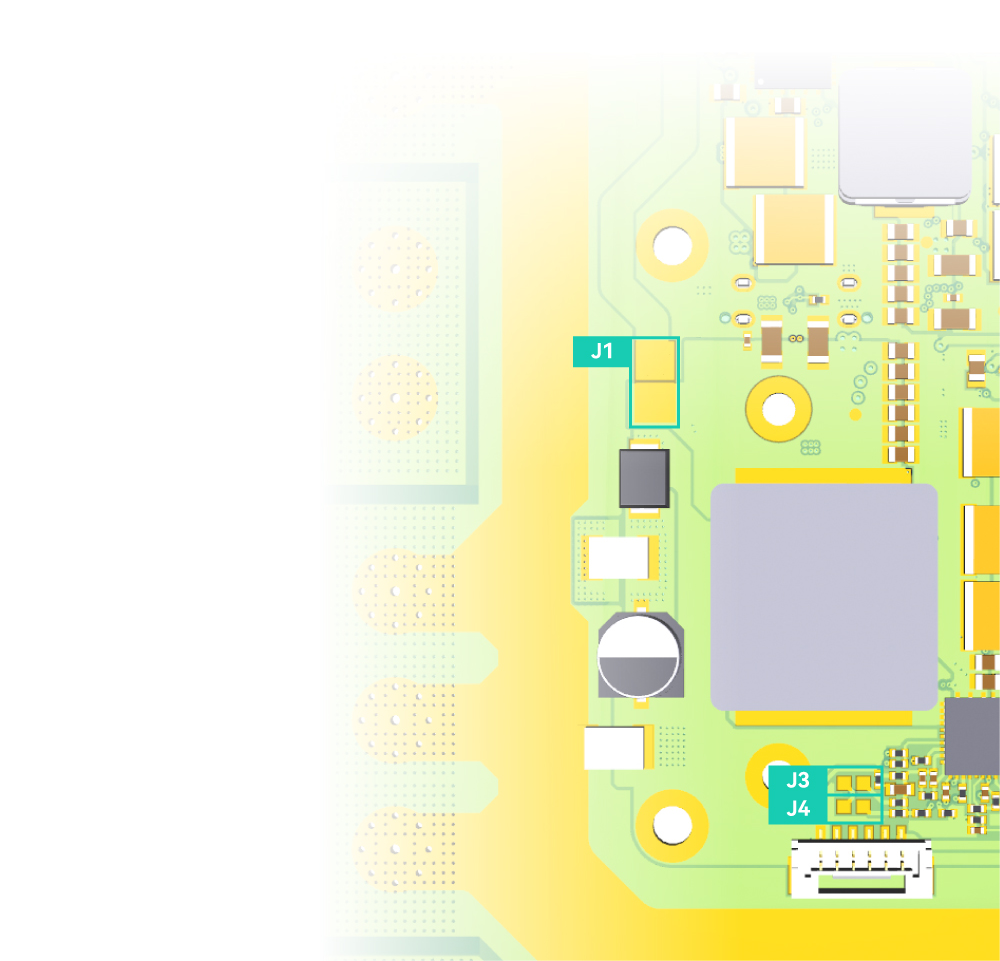
[!NOTE] 出厂配置JP1/JP3/JP4均为悬空,此时Servo_vcc(图中黑色框)为独立电路,电压为0V。当短接JP1时,Servo_vcc连通VOUT电路,电压为5V;当JP3短接时,VOUT电路电压变为7.4V;当短接JP3和JP4时,VOUT电路电压变为8.2V。
5V PWM
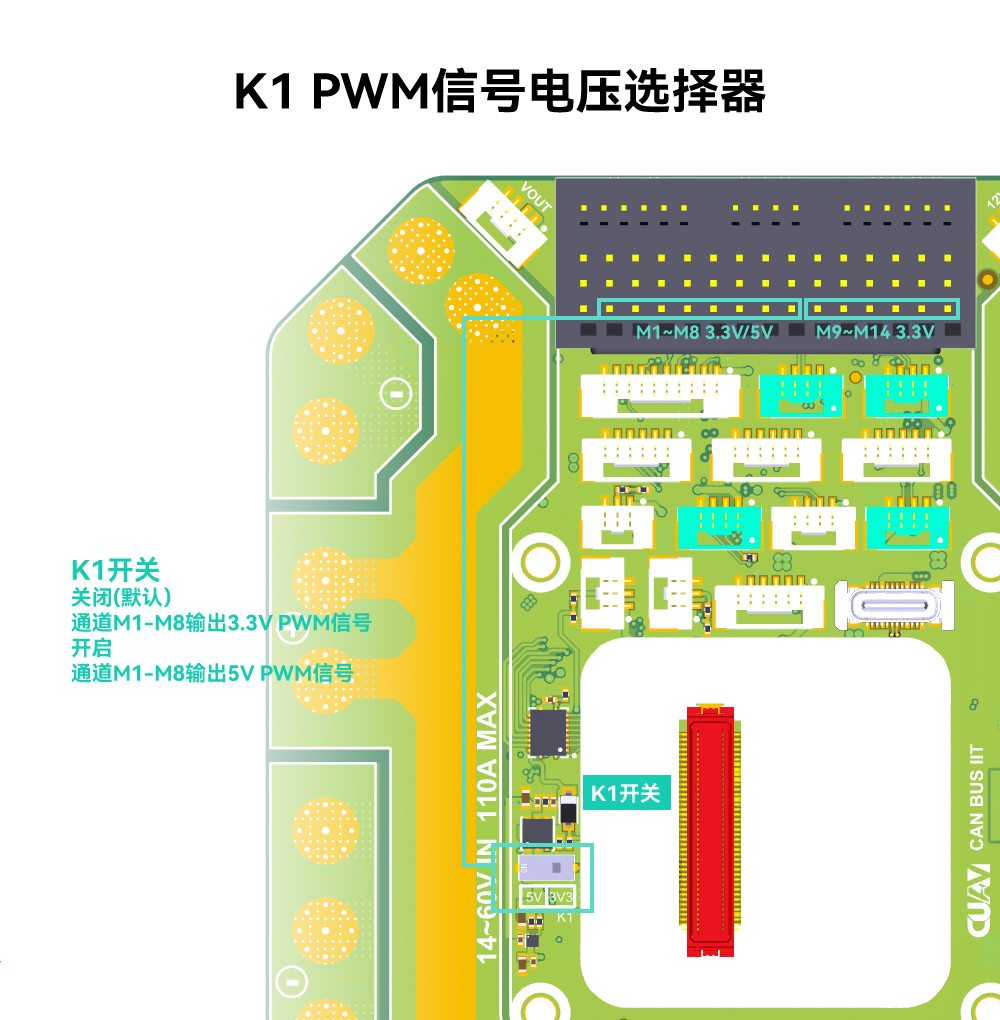
[!TIP] 当使用支持5V PWM控制信号的电调时,开启K1开关,自动驾驶仪M1-M8输出5V PWM控制信号,可以有效的提升抗干扰能力。