CAN PDB配置指南(PX4)
本章节适用于将CAN PDB搭配PX4飞行栈(运行PX4固件的自动驾驶仪)者。
启用电压电流检测
启用电压电流检测需要设置自动驾驶仪参数,将自动驾驶仪连接至QG地面站,在全部参数表里设置以下参数,在写入后重启自动驾驶仪:
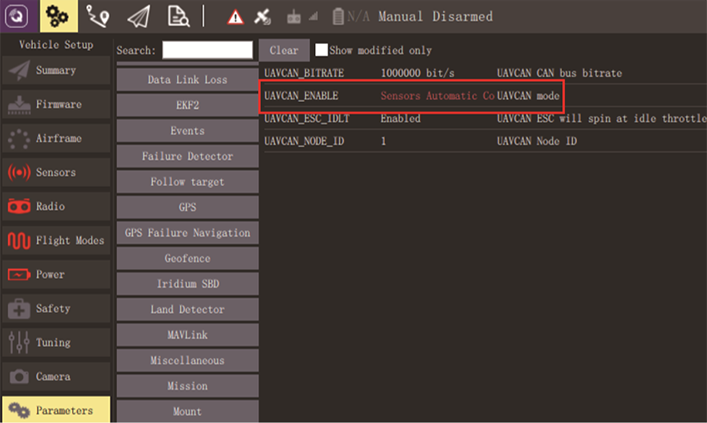
UAVCAN_ENABLE 设置为"Sensor Automatic Config"
UAVCAN_SUB_BAT设置为"Raw data"
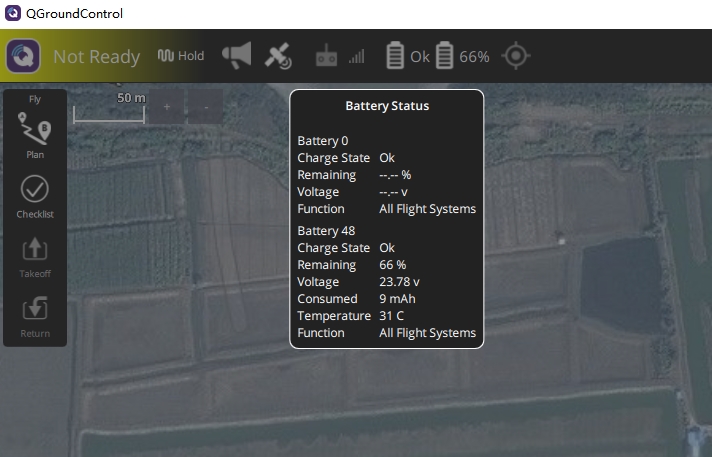
查看电源信息
个性化配置
CAN PDB提供了7个参数可供用户个性设置。
BATTERY_ID //电池ID,无效
CAN_NODE_ID //CAN节点ID
CELL_SERIES_NUM //电池电芯数量,默认为0(自主识别),用于估计电量百分比。
CELL_FULL_VOLTAGE //单片电芯满电电压,用于估计电量百分比。
CELL_EMPTY_VOLTAGE //单片电芯空电电压,用于估计电量百分比。
CALIBRATION_PARAM //校准状态标识符,数值为1则已经校准(只读不能写)。
USE_TMP112 //温度传感器,默认为1(开启),设置为0关闭。
[!NOTE] 一般情况下,默认参数能够符合大多数用户的需求,非必要不要修改它。
修改参数
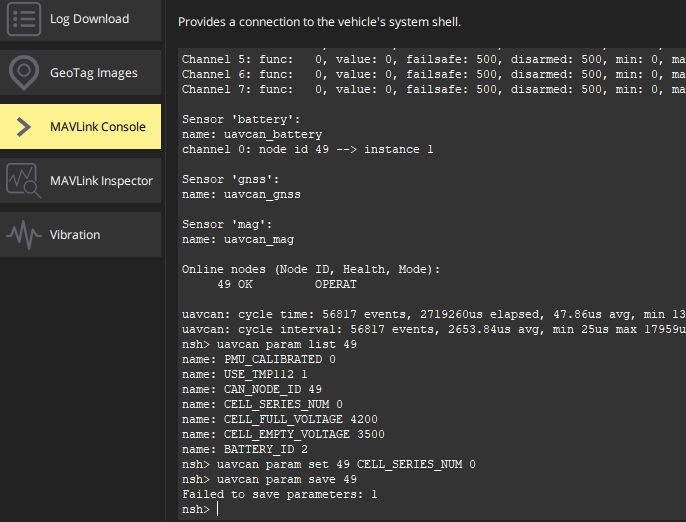
将自动驾驶仪连接至QGoundControl地面站,打开Analyze Tools》MAVlink console界面,发送以下指令进行配置:
- uavcan status //获取CAN PDB的NODE ID(需要按“Enter”键发送指令)
- uavcan param list+[ID] //读取CAN PDB参数信息
- uavcan param set + [ID] + [参数] + [数值] //设置(修改)参数值
- uavcan param save+[ID] //保存参数配置
高压电池设置
以一块6S单节电芯满电为4.35v,空电电压为3.3v电池组,CAN PDB节点ID为49为例。 在MAVlink console界面发送如下指令:
uavcan param set 49 CELL_SERIES_NUM=6
uavcan param set 49 CELL_FULL_VOLTAGE=4350
uavcan param set 49 CELL_EMPTY_VOLTAGE=3300
uavcan param save 49
[!NOTE] 如果提示保存失败,重启设备后再次读取设备配置信息,检查是否修改成功。