Pixhawk V6X AutoPilot
Pixhawk V6X® is a new generation of Pixhawk® designed by CUAV and PX4; it is designed based on the Pixhawk FMU V6X standard and pursues ultimate security and stability; it adopts H7 double-precision floating-point arithmetic unit and Cortex®-M3 coprocessor, independent bus and power supply. Three redundant IMU, IMU temperature factory pre-calibration technology, dual redundant barometer design, all-round guarantee of UAV flight safety and rich expansion capabilities; integrated 100M Ethernet PHY, can communicate with the mission computer ( Airborne computer), fiber optic inertial navigation, high-end surveying and mapping cameras and other industrial UAV-mounted equipment for high-speed communication, which meets the needs of high-end UAVs.

Feature of product
- Official original Pixhawk FMU v6X standard
- H7 double precision floating point (CPU&FPU) processor
- 3 IMUs with independent bus and independent power supply
- High performance, low noise automotive grade IMU
- 100M Ethernet port
Quick Summary
- FMU Processor: STM32H753
- 32 Bit Arm® Cortex®-M7, 480MHz, 2MB flash memory, 1MB RAM
- IO Processor: STM32F100
- 32 Bit Arm® Cortex®-M3, 24MHz, 8KB SRAM
On-board sensors:
- Accelerometer/Gyroscope: BMI088
- Accelerometer/Gyroscope: ICM42688-P
- Accelerometer/Gyroscope: ICM20649
- Magnetometer: RM3100
- Barometer: ICP-20100
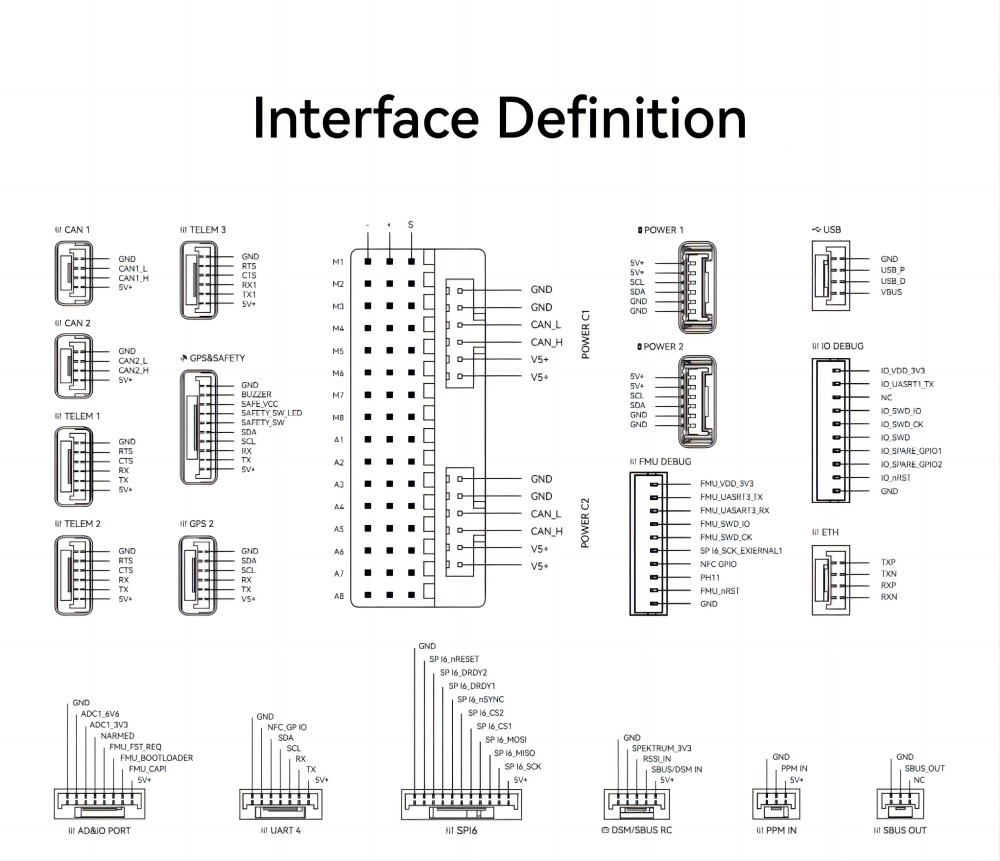
Interfaces:
- 16 PWM servo outputs(M1~M8 form IO;A1~A8 form FMU)
- 1 Dedicated R/C input for PPM
- 1 Dedicated R/C input for Spektrum / DSM and S.Bus with analog / PWM RSSI input
- 3 TELEM Ports(with full flow control)
- 1 UART4
- 2 GPS ports
- 1 full GPS plus Safety Switch Port(GPS1)
- 1 basic GPS port(with I2C,GPS2)
- 2 USB Ports
- 1 TYPE-C
- JST GH1.25
- 1 Ethernet port
- Transformerless Applications
- 100Mbps
- 1 SPI bus
- 2 chip select lines
- 2 data-ready lines
- 1 SPI SYNC line
- 1 SPI reset line
- 2 CAN Buses for CAN peripheral
- CAN Bus has individual silent controls or ESC RX-MUX control
- 4 power input ports
- 2 Dronecan/UAVCAN power inputs(MOLEX 1511000006)
- 2 SMBUS/I2C power inputs(MOLEX 5055680681-5055650601)
- 1 AD & IO port
- 2 additional analog input(3.3 and 6.6v)
- 1 PWM/Capture input
- 2 Dedicated debug
- FMU debug
- IO debug
- Electrical data
- Voltage Ratings:
- Max input voltage: 5.70V
- USB Power Input: 4.75~5.25V
- Servo Rail Input: 0~9.9V
- Current Ratings:
- Telem1 and GPS2 output current limiter: 1.5A
- All other port combined output current limiter: 1.5A
- Weight
- Flight control:99g
- Core Module:43g
- Baseboard: 56g
- Voltage Ratings:
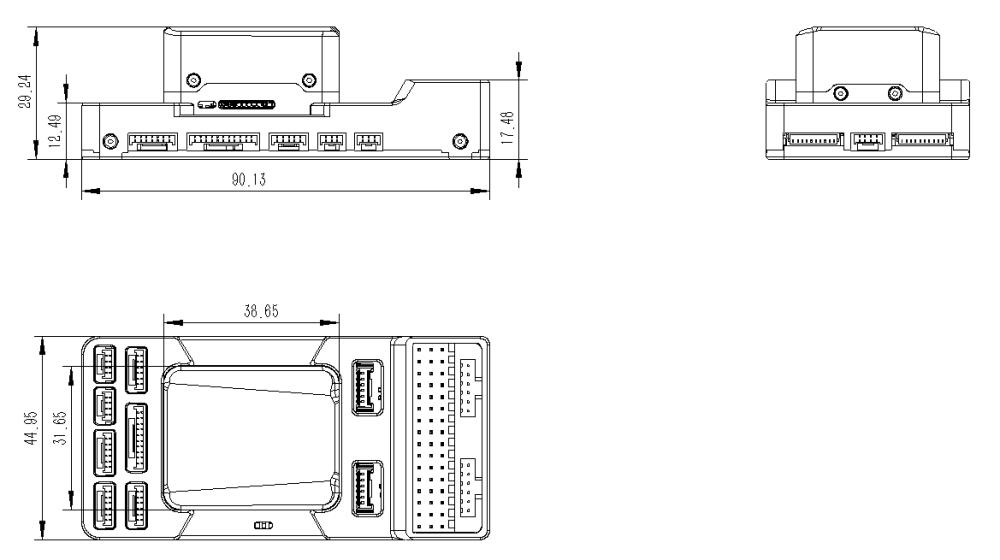
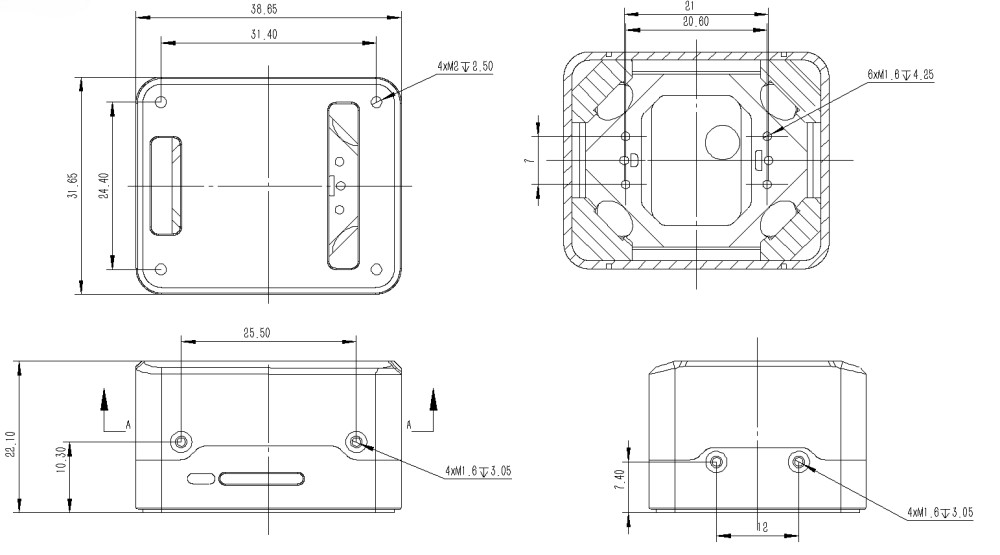
Size
Flight control
CORE
Where to Buy
Pinouts
Peripherals
- Digital Airspeed Sensor
- Telemetry Radio
- Rangefinders/Distance sensors
- others