NEO 3 Pro GNSS module
Overview
NEO 3 Pro uses a hardware design similar to NEO v2 Pro, and upgrades the GNSS navigation module to the M9N module that supports the four mainstream satellite systems of Beidou, GPS, Galileo and Glonass. The positioning accuracy has been significantly improved. It is a high Cost-effective unmanned system positioning and navigation module. It integrates compass, barometer, flight controller status light, buzzer, and safety switch in one; it has the characteristics of high sensitivity and strong anti-interference.

[!NOTE] Ardupilot 4.0/PX4 1.13.0 and above support NEO 3Pro.
Product features
- Integrated Ublox latest generation GNSS module (NEO-M9N)
- Support the concurrency of four mainstream satellite systems to adapt to more complex environments
- Dedicated antenna supporting four major satellite systems
- UAVCAN standard protocol, high real-time, strong anti-interference
- Industrial grade sensor (RM3100), better anti-interference performance
- High-performance processing unit STM32F412
- Internal high-precision barometer to meet the needs of different application scenarios
- Open source program, support custom program
- Adopting SAW+LNA+SAW double filter design, effectively avoid the influence of remote control, data transmission, 4G signal on GPS positioning reception.
Key data
| Annotate | |
|---|---|
| Processor | STM32F412 |
| Compass | RM3100 |
| Barometer | ICP-20100 |
| Rgb Drive | MCU direct drive |
| Buzzer | Passive buzzer |
| Safety switch | Physical button |
| GNSS receiver | UBLOX NEO M9N |
| Number of concurrent GNSS | 4(Beidou、Galileo、 GLONASS、 GPS) |
| Frequency band | GPS:L1C/A GLONASS:L10F Beidou:B1I Galileo:E1B/C |
| GNSS Augmentation System | SBAS:WAAS,EGNOS,MSAS QZSS:L1s(SAIF), Other:RTCM3.3 |
| Horizontal accuracy | 2.0M |
| Speed accuracy | 0.05M/S |
| Nav. update rate | 25Hz(Max) |
| Number of Satellites | 32+ |
| Acquisition | Cold start:24S Hot start:2S Aided start:2s |
| Number of satellites(MAX) | 32+ |
| Sensitivity | Tracking and nav-167dBm Cold start Hot star-148dBm Reacquisition -160dBm |
| Protocol | Dronecan |
| Wave filtering | SAW+LNA+SAW |
| Anti-Electromagnetic/radio frequency interference | EMI+RFI |
| Upgrade firmware | support |
| Supported flight controller | CUAV series, Pixahwk series |
| Port TYpe | GHR-04V-S |
| Input voltage | 4.7-5.2V |
| Operating temperature | -10~70℃ |
| Size | 60*60*16MM |
| Weight | 33g |
- NEO 3 Pro level accuracy when the SBAS enhancement system is turned on, the nominal accuracy is 1.5m (default); when the SBAS enhancement system is turned off, it is 2.0m
- NEO 3 Pro supports RTCM3.3 injection, but does not support RTCM output; it can achieve pseudorange differential (meter-level positioning) but does not support carrier phase differential (RTK), and it needs a base station that supports RTCM3.3 output.
Purchase
CUAV store(Alibaba) CUAV store
Connection to V5+
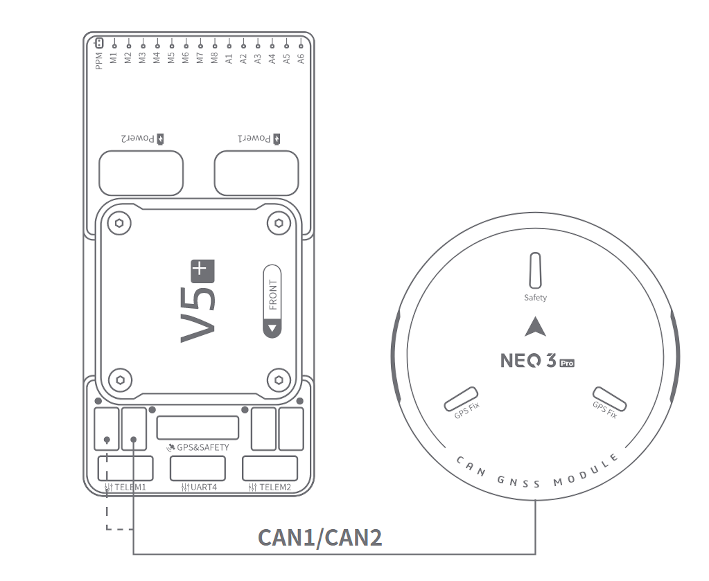
- Please connect it to the flight control CAN1 / CAN2 interface (CAN1 is recommended)
NOTE The connection of other PIX flight controllers is the same.
Enable
you need to set flight control parameters to enable Neo V2 pro; there are different setting methods according to the flight control firmware.
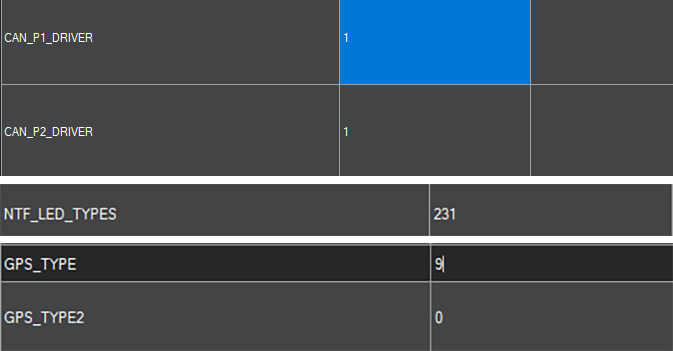
ArduPilot firmware
Set the following parameters in all parameter tables of Mission planner and restart after writing
CAN_P1_DRIVERset to 1.CAN_P2_DRIVERset to 1.NTF_LED_TYPESset to 231.GPS_TYPEset to 9.
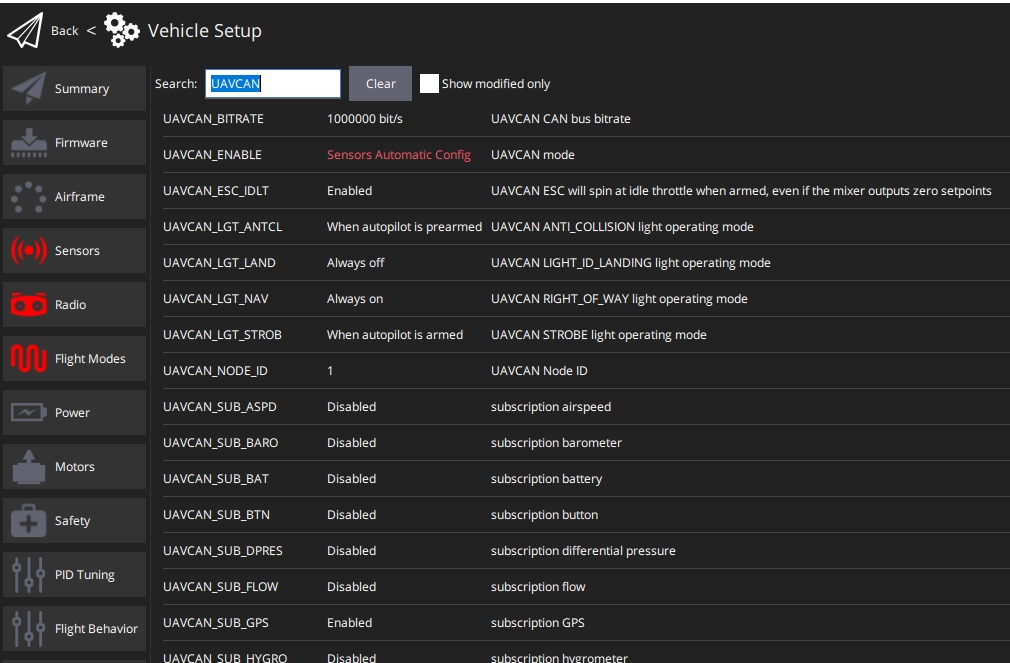
PX4 firmware
Open QGroundControl>Parameters and modify the following parameters
UAVCAN_ENABLESet toSensors Automatic config.UAVCAN_SUB_GPSSet toEnable.