NEO 4SE
NEO 4SE is a high-performance single-point positioning module for unmanned systems. It integrates Ublox's tenth-generation high-precision GNSS receiver, high-performance STM32H5 processor, electronic compass, safety switch, RGB full-color status light, supports DroneCan protocol, and is perfectly compatible with ArduPilot/PX4 firmware.

[!NOTE] The NEO4 SE is fully supported by ArduPilot firmware 4.0 and higher.
Features
- U-blox M10Q Satellite Reception System
- Self-developed highly flexible M4C architecture
- STM32H5 high-performance processing unit
- SAW+LNA dual filtering; stronger anti-interference ability
- ST IIS2MDC electronic compass, strong anti-magnetic interference
- Multi-function RGB full-color status light
- DroneCAN standard protocol, high real-time performance and strong anti-interference
- Compatible with ArduPilot and PX4
Data sheet
| Basic parameters | |
|---|---|
| Satellite receiver | U-blox MIA-M10Q |
| Processor | STM32H5 Arm® Cortex®-M33 250 MHz |
| Compass | IIS2MDC |
| Frequency Band | GPS: L1 C/A GLONASS: L1OF 北斗: B1I/B1C Galileo: E1B/C QZSS: L1 C/A L1S |
| Augmentation systems | SBAS: EGNOS, GAGAN, MSAS, WAAS, BDSBAS, KASS and SouthPAN QZSS: L1S (SLAS) |
| Number of Concurrent GNSS | 4(BeiDou, Galileo, GLONASS, GPS) |
| Oscillators | TCXO |
| Acquisition | Cold Start : 27s Hot Start : 1s Aided Start : 1s |
| Sensitivity | Tracking and nav:-167dBm Reacquisition: -160dBm Cold start:-148dBm Hot star: -159dBm |
| Nav. Update Rate | Default:5Hz, Up to 10Hz(four satellite system) Up to 25Hz(single satellite system) |
| Horizontal Position Accuracy | 1.5m CEP |
| Signal Integrity | RF interference and jamming detection and reporting Spoofing detection and reporting |
| Wave filtering | SAW+LNA+SAW+LNA |
| Anti-Electromagnetic/radio frequency interference | EMI+RFI |
| Protocol | DroneCAN |
| Upgrade Firmware | Support |
| Firmware | CUAV M4C GNSS |
| Data Interface | GHR-04V-S |
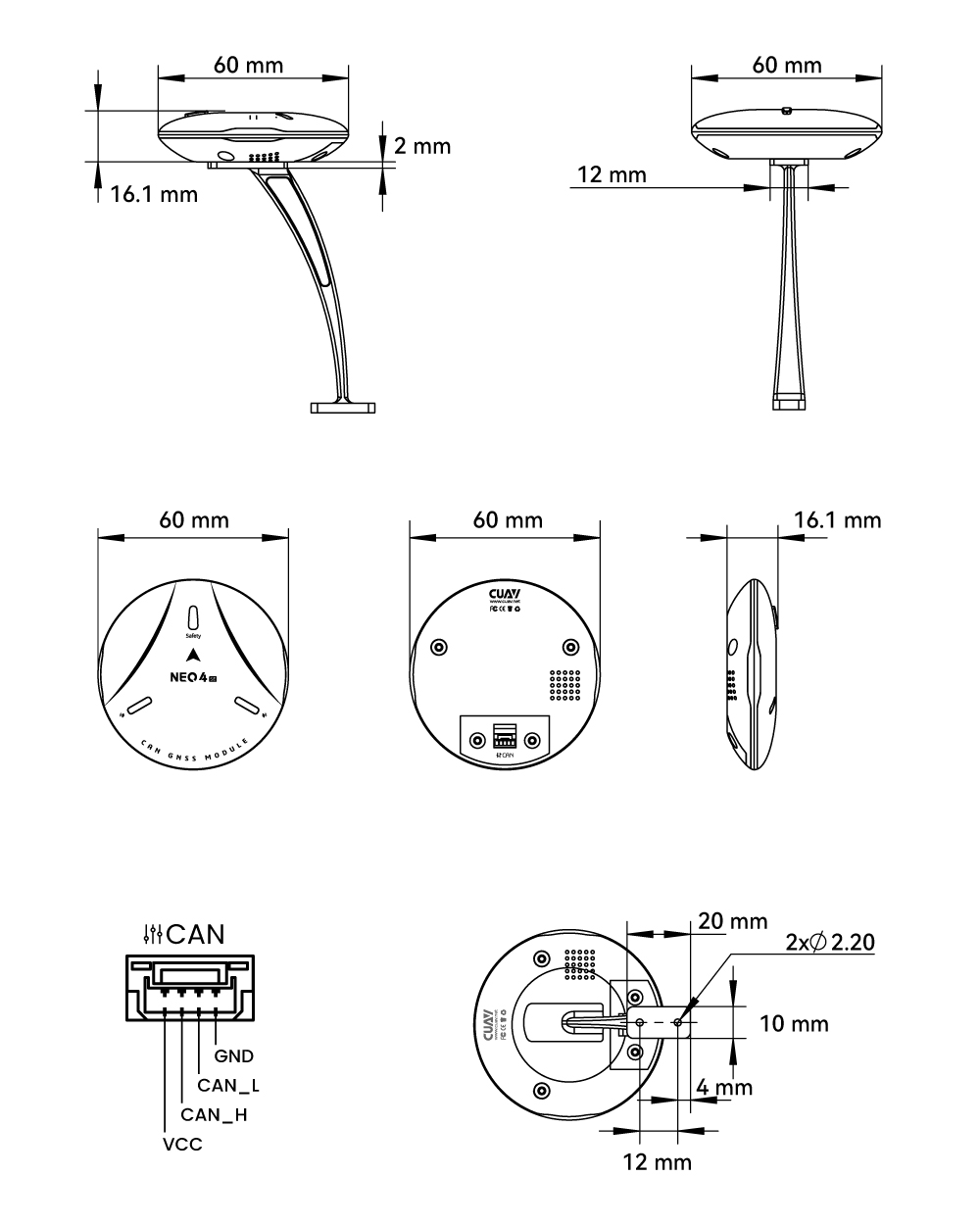
| Size | 60mmx60mmx16.1mm |
| Weight | 33g |
| Input Voltage | 4.7 V ~ 5.2V |
| Operating Temperature | -10 ℃ ~ +80℃ |
[!NOTE] Ardupilot 4.1.0/PX4 1.13.0 and above versions fully support NEO 4SE.
Size and Pinouts
Purchase
Hardware connection
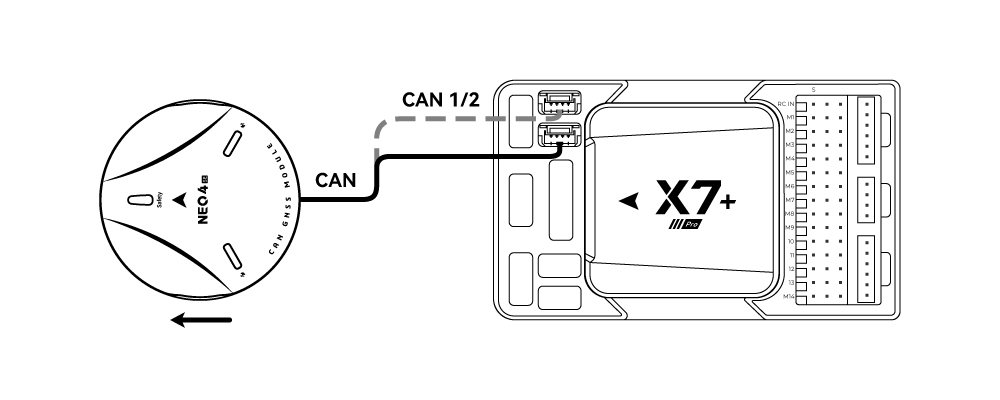
- Connect neo 4SE to the CAN1/CAN2 interface of the smart controller (CAN1 is recommended)
[!TIP] The rest of the ArduPilot/PX4 flight stack setup is the same.
Flight control parameter settings
You need to set the flight controller parameters to enable Neo 4SE; the setting method varies depending on the flight controller firmware.
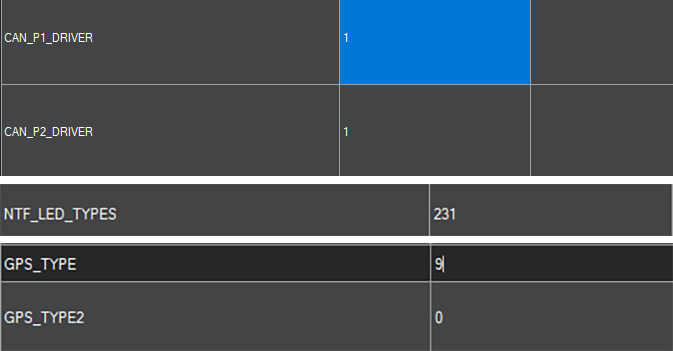
ArduPilot
Set the following parameters in the Mission planner's All Parameters table and restart after writing:
CAN_P1_DRIVERis set to 1.CAN_P2_DRIVERis set to 1.NTF_LED_TYPESis set to 231.GPS_TYPE/GPS1_TYPEis set to 9 (if used as GPS1).
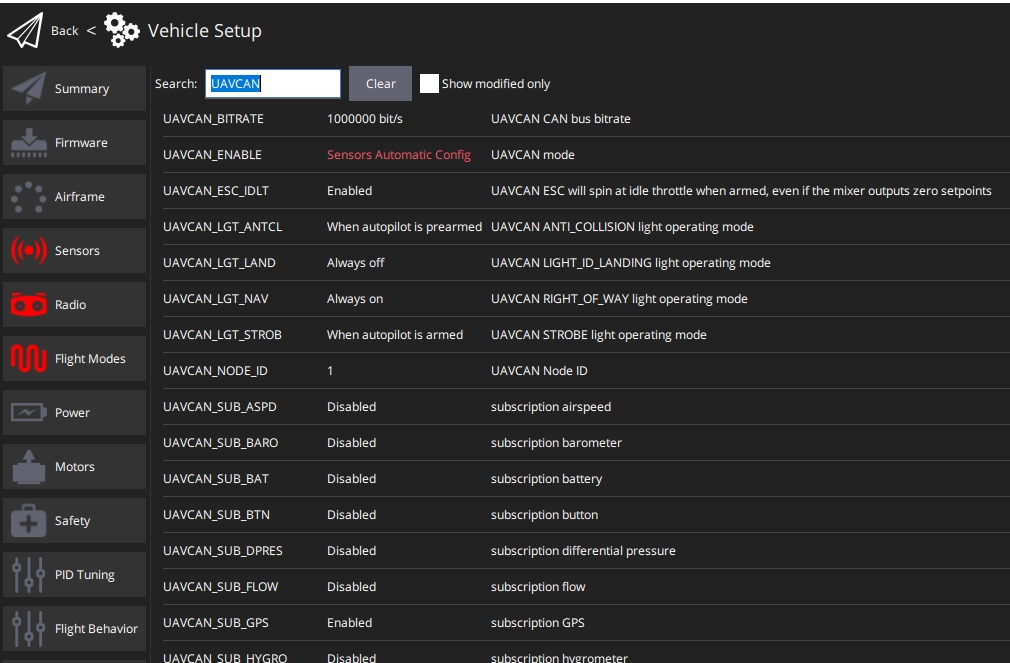
PX4
In the QGroundControl>Parameters window set the following parameters and reboot after writing:
UAVCAN_ENABLEis set to Sensors Automatic config .UAVCAN_SUB_GPSis set to Enable.