NEO 4 Nano微型定位系统
NEO 4 NANO 是一款微型卫星导航接收模块。采用高集成微型化设计,集成 u-blox M10 卫星接收系统,支持四大定位系统信号并发接收。搭载高性能 STM32H5 处理器、ST IIS2MDC 电子罗盘。定位精准,具备优秀抗干扰性与环境适应性。支持 RGB 全彩状态指示灯,采用 CAN 总线协议,可广泛应用于各类无人系统设备。

[!NOTE] ArduPilot 4.0及更高版本的固件完全支持NEO 4 NANO。
数据表
| 项目 | 详情 |
|---|---|
| 卫星接收器 | u-blox MIA-M10Q |
| 处理器 | STM32H5 Arm® Cortex®-M33 250 MHz |
| 电子罗盘 | IIS2MDC |
| 工作频段 | GPS:L1 C/A GLONASS:L1OF 北斗:B1I/B1C Galileo:E1B/C |
| 卫星增强系统 | SBAS、EGNOS、GAGAN、MSAS、WAAS、BDSBAS、KASS and SouthPAN QZSS L1S (SLAS) |
| 并发星座数量 | 4(北斗、Galileo、GLONASS、GPS) |
| 振荡器 | TCXO |
| 捕获速度 | 冷启动 27 s 再次启动 1 s 辅助捕获 1 s |
| 导航刷新率 | 高达10 Hz(四个并发GNSS) 高达25 Hz(单个GNSS) |
| 水平精度 | 1.5 m CEP |
| 信号完整性 | 射频干扰和干扰检测及报告 欺骗检测及报告 |
| 滤波 | SAW LNA+SAW+LNA |
| 防电磁/射频干扰 | EMI+RFI |
| 通讯协议 | DroneCAN |
| 升级支持 | 支持 |
| 运行固件 | CUAV M4C GNSS |
| 数据接口 | GHR-04V-S |
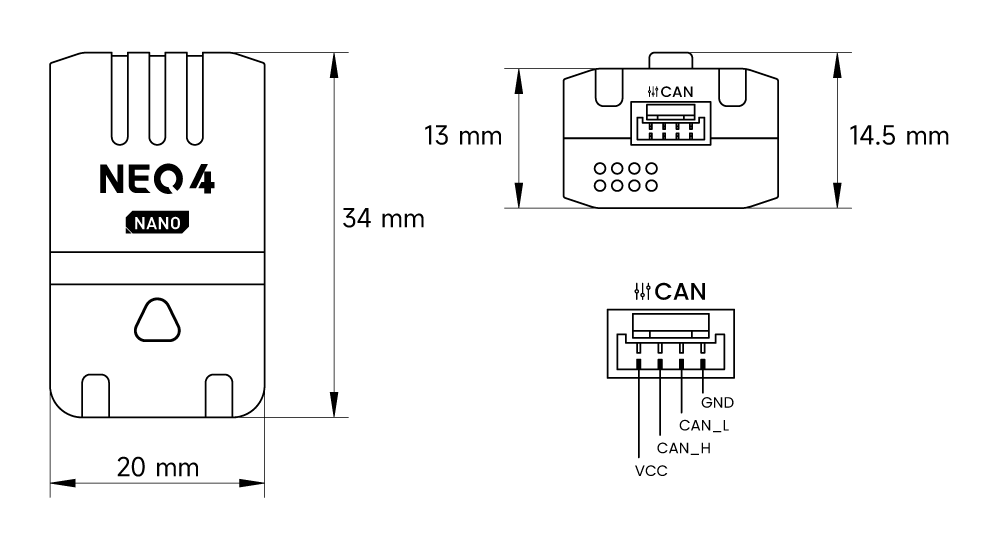
| 尺寸 | 34 × 20 × 14.5 mm |
| 重量 | 10.6 g |
| 工作电压 | 4.5 ~ 5.4 V |
| 运行温度 | -10 ~ +80 ℃ |
尺寸与引脚定义
采购
连接到控制器
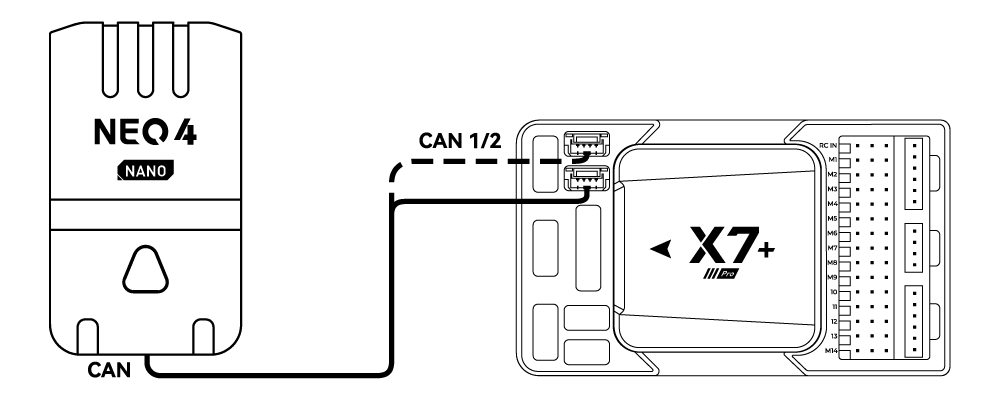
- 连接到智能控制器CAN1/CAN2接口(推荐连接CAN1)
[!TIP] 需要控制器支持Dronecan协议,比如ArduPilot和PX4飞行栈。
控制器参数设置
使用前需要设置控制器参数启用Neo 4 Nano;根据控制器的固件有不同设置方法。
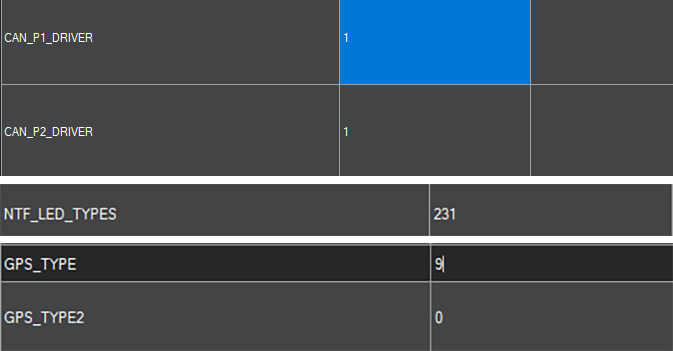
ArduPilot固件
在Mission planner的全部参数表设置以下参数并在写入后重启:
CAN_P1_DRIVER设置为1.CAN_P2_DRIVER设置为1.NTF_LED_TYPES设置为231.GPS_TYPE/GPS1_TYPE设置为9(如果作为GPS1).
使用LGC地面站,您可以免调参数快速配置它。

NEO 4 Nano开放的自定义参数
[!TIP] 正常情况下,是不需要修改Neo 4 nano的参数配置的,即插即用。如果您需要修改它的参数,请使用LGC/Missionplanner修改它。
| 参数名 | 参数说明 | 默认值 | 补充说明 |
|---|---|---|---|
| CAN1_FD_BITRATE | CAN接口FD数据兆比特率(Mbps) | 4 | 与ardupilot默认值一致 |
| CAN1_FD_EN_MODE | 控制CAN接口的FD使能模式 | 2(自动CANFD模式) | 0=关闭CANFD;1=强制开启CANFD;2=满足特定条件自动开启,开启后断电才恢复 |
| CAN_NODE_ID | 配置模块的DroneCAN节点ID | 0 | 0代表系统自动分配 |
| CAN_R | 是否启动CAN终端电阻 | False(不启用) | True为使能终端电阻 |
| FLASH_BOOTLOADER | 更新Bootloader | 0 | 设为1可更新旧Bootloader,完成后自动还原为0 |
| GNSS_ITFM_SEND | 是否通过DroneCAN定位消息发送GNSS信号干扰和欺骗检测数据 | 0 | PX4会使用该数据,信号干扰异常时PX4无法解锁 |
| GNSS_MODE | 设置使用的导航卫星系统(掩码形式) | 111 | 位对应不同卫星系统;MIA-M10C开启格洛纳斯(BIT6)时,北斗B1I不可同时开启,BIT6+BIT3时北斗用B1C信号 |
| GNSS_RATE_MS | CAN定位相关消息的输出时间周期(ms) | 200 | 默认1秒输出5次 |
| GPS_TYPE | 兼容APM飞控参数设置 | 2 | 解决APM的GPS_AUTO_CONFIG设为2导致飞控无法使用DroneCAN定位消息的问题 |
| RGB_BRIGHTNESS | RGB灯亮度调节 | 100 | 100为100%亮度,设为0禁用RGB灯 |
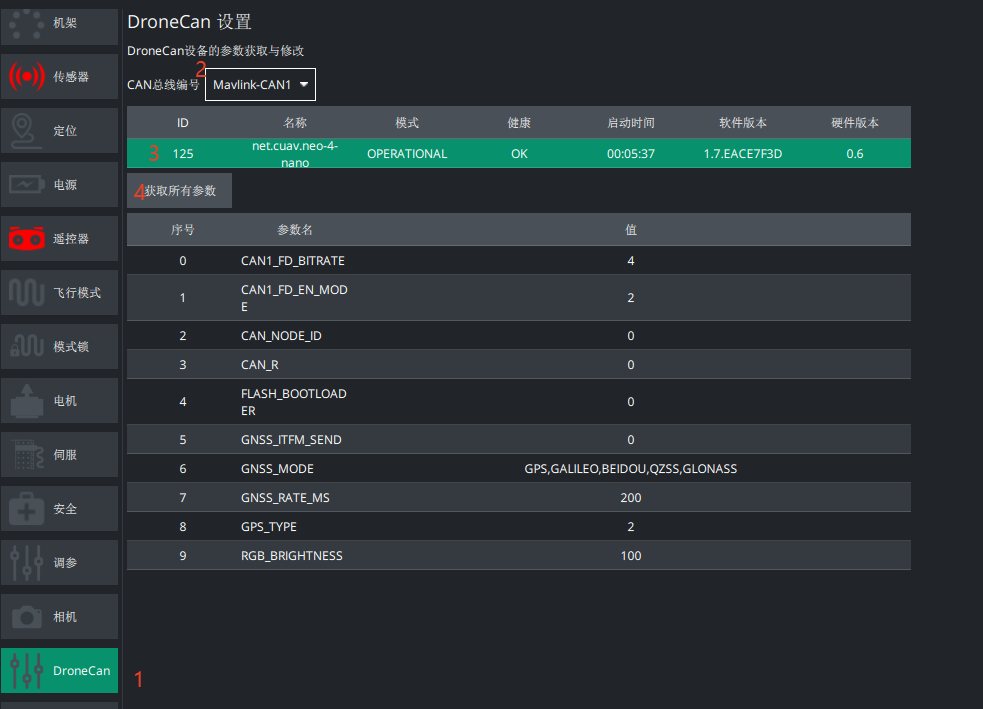
使用LGC地面站修改Neo 4 nano的参数配置,步骤如下:
- 点击右上角“LGC图标”,进入无人机设置界面》Dronecan界面。
- CAN总线编号选择硬件连接的CAN接口编号。
- 点击选择需要设置的CAN设备。
- 获取所有参数。
- 选择需要修改的参数,在弹出的数据框中写入值;点击保存。
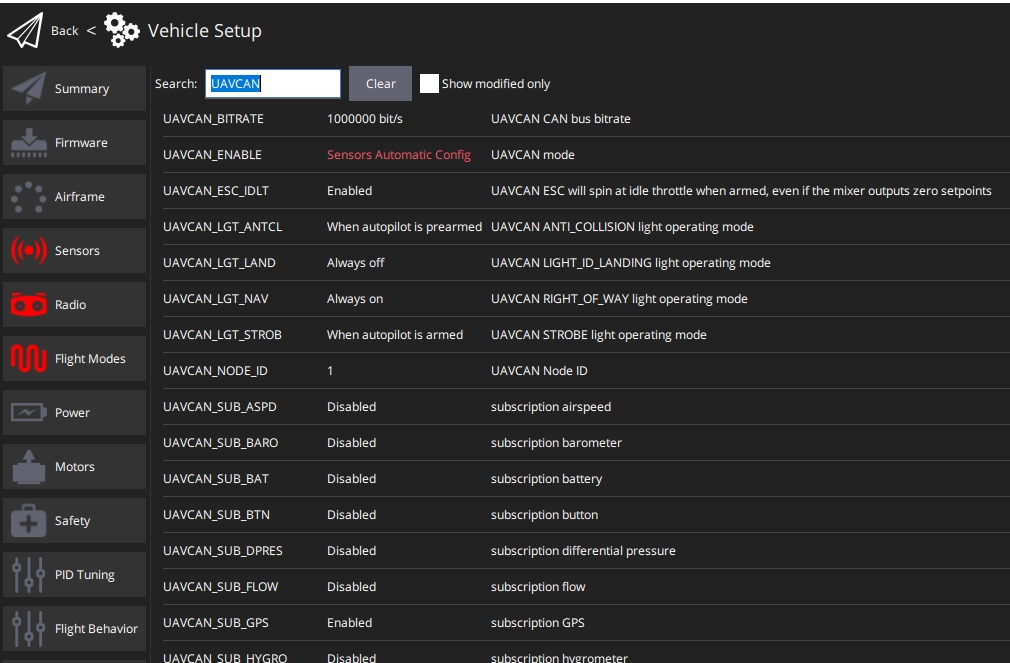
PX4固件
在QGroundControl>Parameters窗口设置以下参数并在写入后重启:
UAVCAN_ENABLE设置为Sensors Automatic config .UAVCAN_SUB_GPS设置为Enable.