ArduPilot固件使用指南
本章将描述V5系列运行ArduPilot固件时需要注意的要点,除本章外您可能还需要阅读以下内容:
加载固件
V5系列®控制器支持ArduPilot,下面主要讲解如何加载ArduPilot固件。
[!TIP] V5+/V5 NANO完美兼容ArduPilot AC3.7/AP3.98以上固件.
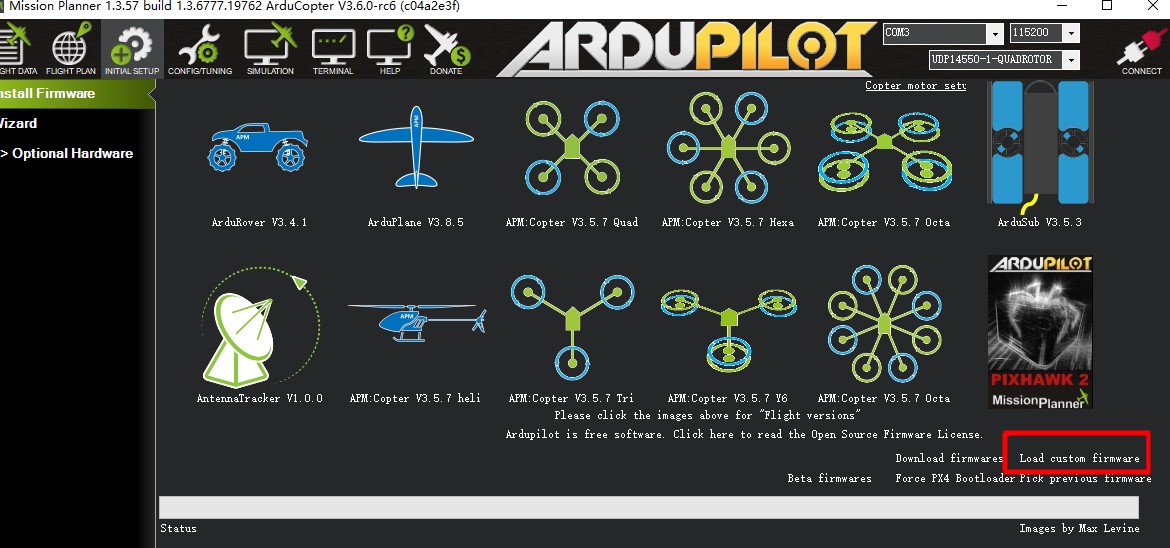
在线烧录固件:
将控制器接入到电脑,打开地面站,点击初始设置界面》选择安装的固件(V5/V5+:CUAV V5; V5 nano:CUAVv5nano)》等待烧录完成.
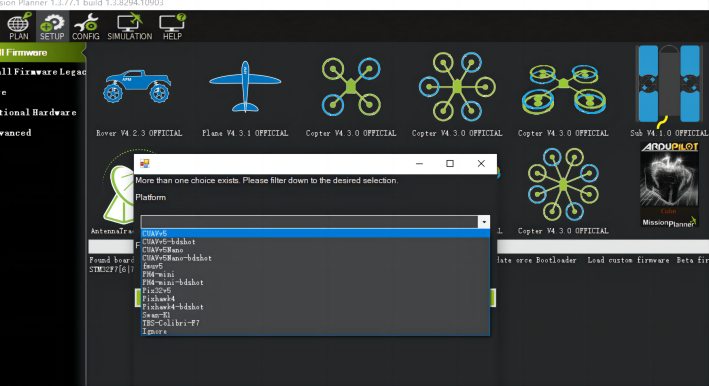
本地烧录固件:
请先下载固件到本地: V5/V5+(固件文件夹CUAVv5):
选择加载自定义固件》选择下载的固件》等待烧录完成
UART串口映射
- SERIAL0 = console = USB
- SERIAL1 = Telemetry1 = USART2
- SERIAL2 = Telemetry2 = USART3
- SERIAL3 = GPS1 = USART1
- SERIAL4 = USER = UART4
- SERIAL5 = USER = USART6
- SERIAL6 = USER = UART7(DSU7)
- SERIAL7 = USER = OTG2
RC输入
请使用专用的线缆连接遥控器接收机(注意标签标识),RCIN接口支持除CRSF之外的所有协议(SBUS/PPM/DSM);对于CRSF及带有遥测的双向协议的接收机,需要连接到UART接口,例如Serial6(UART7). 以下为设置教程:
- SERIAL6_PROTOCOL应设置为“23”。
- FPort:将SERIAL6_OPTIONS设置为“15”。
- CRSF:将SERIAL6_OPTIONS设置为“0”。
- SRXL2:将SERIAL6_OPTIONS设置为“4”并且仅连接TX引脚。
任何UART都可以用于连接ArduPilot中的RC接收机,并且兼容除PPM之外的所有协议。有关详细信息,请参阅无线电控制系统。
PWM输出
V5系列飞控支持最多14个PWM输出,8个来自IO(M1~M8),6个来自FMU(A1~A6).
FMU Servo输出分组:
第一组:A1~A4
第二组:A5~A6
[!NOTE] 同一组中的PWM输出需要使用相同的输出速率和协议,如果组中的任何输出使用DShot,则该组中的所有通道都需要使用DShot。
GPIO
A1~A6都可以作为GPIOs (relays(继电器), 相机快门, RPM等). 作为GPIO需要设置SERVOx_FUNCTION=-1(X为引脚序号).
GPIO引脚映射关系:
V5/V5+
- AUX1(A1) 50
- AUX1(A2) 51
- AUX1(A3) 52
- AUX1(A4) 53
- AUX1(A5) 54
- AUX1(A6) 55
V5 Nano
- PWM1(M1) 50
- PWM2(M2) 51
- PWM3(M3) 52
- PWM4(M4) 53
- PWM5(M5) 54
- PWM6(M6) 55
- PWM7(M7) 56
- PWM8(M8) 57
- PWM9(A1) 58
- PWM10(A2) 59
- PWM11(A3) 60
Take V5+ A6 as the relay pin as an example; set Relay_pin=55.
模拟输入
V5系列有两个模拟输入接口(ADC3.3/ADC6.6V).
- ADC Pin4 -> ADC 6.6V
- ADC Pin14 -> ADC 3.3V
- RSSI PIN=8
电池监测器(电流计设置)
V5系列飞控®标配HV_PM电流计,将该电流计连接到Power 1.
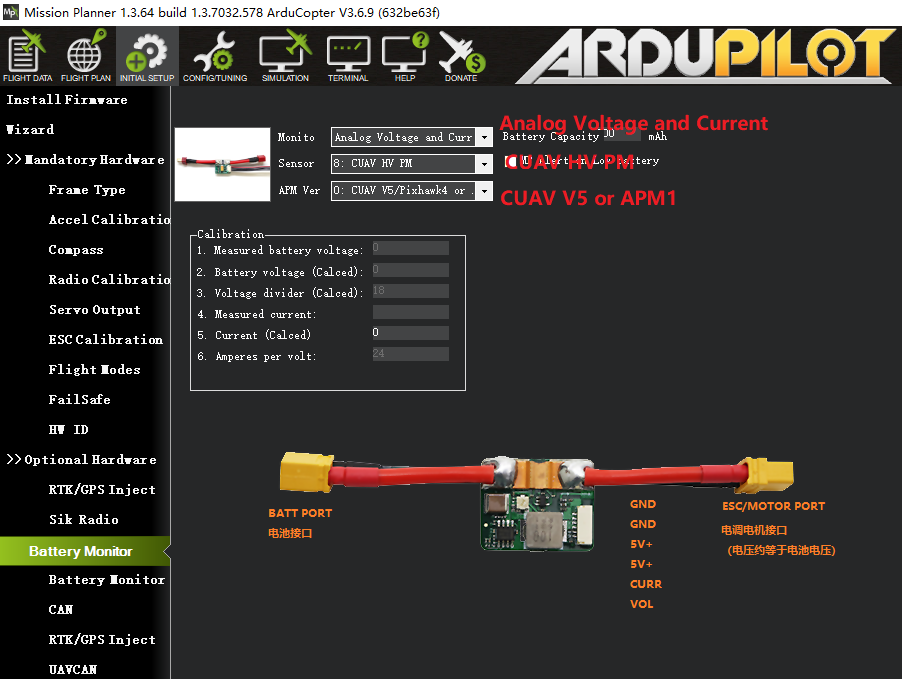
如图,在Mission planner中设置以下参数:
- 监控器:Anglog Voltage and Current(电压和电流)
- 传感器:CUAV HV PM
- APM版本:CUAV v5 or APM1(v5系列飞控都选择CUAV v5)
- 点击其它任意界面,写入参数。
- 重启地面站和飞控。
如果连接至Power 2接口,并设置以下参数:
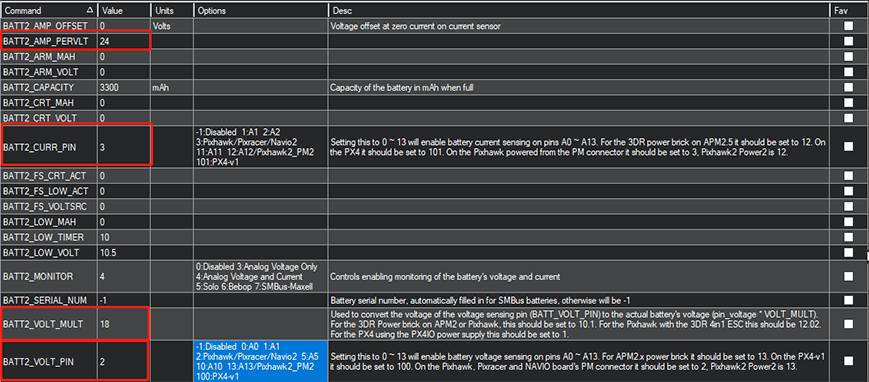
在全部参数表中设置并写入以下参数:
- BATT2_AMP_PERVLT=24
- BATT2_CURR_PIN=3
- BATT2_VOLT_MULT=18
- BATT2_VOLT_PIN=2
罗盘
V5系列内置IST8310磁罗盘,一般情况下飞控位于无人机内部,磁场环境复杂,理应优先使用外部指南针(例如GPS上的指南针)作为主要指南;始终确保为外部指南顺序高于内部指南针。
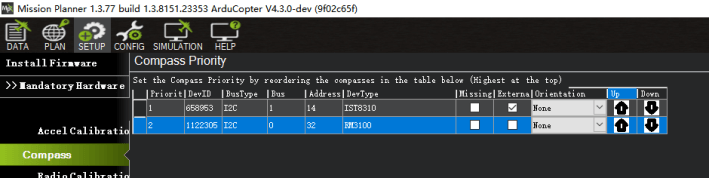
如果您的指南针设置如下:
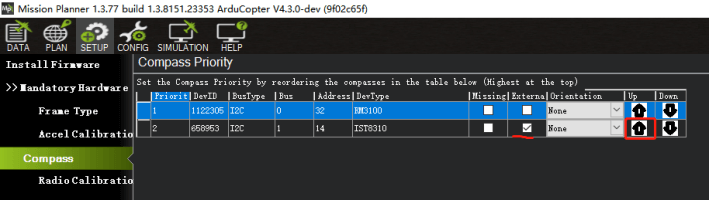
请按照上图指示将外置指南针设置为第一个指南针。
开发指南
[!COMMENT] CUAV不提供固件及软件二次开发技术指导,如有相关问题,请仔细阅读相关指南或ArduPilot discord_频道寻求ArduPilot协助。
ArduPilot固件编译命令
V5/V5+
./waf configure --board CUAVv5
./waf copter --upload
V5 nano
./waf configure --board CUAVv5nano
./waf copter --upload