V5+智能控制器
V5 + ® 是CUAV®与PX4团队共同设计并由CUAV制造的高级智能控制器。它基于Pixhawk FMUv5 设计标准,并且完美兼容PX4 和 ArduPilot固件 。
主要应用场景:
可作为无人系统控制智能控制器开发板,也可以写入ArduPilot/PX4程序;适用且不限于以下框架:
- 无人车(含割草机、农业喷洒车、快递投送车等)
- 无人船
- 无人潜航器
- 无人机(各种形态与规格的直升机、多旋翼、固定翼、垂直起降固定翼等)
- 机器人
除此之外,V5+还具有以下优势:
1、支持RTK厘米定位;
2、双电源模块接口;
3、多彩环绕灯;
4、全铝合金外壳;
5、丰富的扩展接口;
硬件参数
| 硬件参数 | |
|---|---|
| 主处理器 | STM32F765(32 Bit Arm® Cortex®-M7, 216MHz, 2MB flash, 512KB RAM) |
| 协处理器 | STM32F100(32 Bit Arm® Cortex®-M3, 24MHz, 8KB SRAM) |
| 传感器 | |
| 加速计 | ICM-20602/ICM-20689/BMI055 |
| 陀螺仪 | ICM-20602/ICM-20689/BMI055 |
| 电子罗盘 | IST8310 |
| 气压计 | MS5611 |
| 外部接口 | |
| UART串口 | 5 |
| I2C | 4 |
| SPI | 1 |
| CAN标准总线 | 2 |
| ADC | 2 |
| PWM输出 | 标准8 PWM IO+6个可编程IO |
| DSM/SBUS/RSSI | 1 |
| PPM IN | 1 |
| CAN标准总线 | 2 |
| PM电源模块输入 | 2 |
| GPS与安全开关 | 1 |
| Debug/F7 SWD接口 | 1 |
| USB接口 | 1(Type-C) |
| TF卡槽 | 1 |
| 相关接口协议 | |
| PPM IN | PPM |
| DSM/SBUS | DSM/SBUS;RSSI:PWM/3.3v模拟电压 |
| GPS | NMEA/UBLOX |
| 工作环境及物理参数 | |
| Power工作电压 | 4.5 ~ 5.5 V |
| USB输入电压 | 5V(±0.25v) |
| 伺服输入电压 | 0-36v |
| 工作温度 | -20 ~ 85°c |
| 尺寸 | |
| 长X宽X高 | 85.5*42*33mm |
| 重量 | 91g |
购买链接
接口定义
[!NOTE] V5+智能控制器采用Pixhawk fmuv5引脚标准,与Pixhack系列定义不同,请尽量使用原装配线(绿色连接器为连接飞控端)。
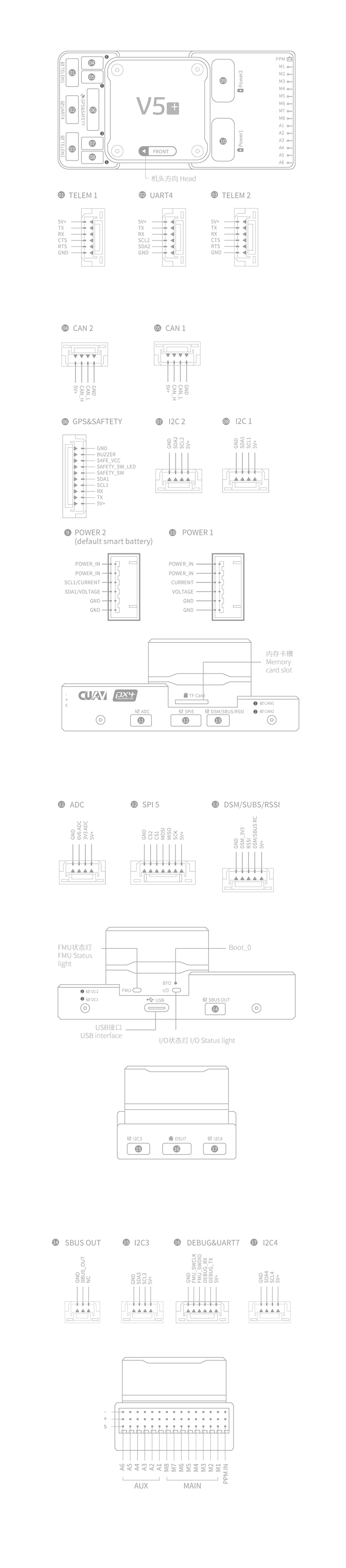
[!Comment] DUS7为CUAV全新命名的接口,其包含FMU SWD接口及UART7,其中当V5运行PX4固件时UART7作为DEBUG接口,当V5运行ArduPilot固件UART7作为通用串行口。POWER2默认为I2C智能电池接口。RCIN接口只限于给遥控器供电,不可接入任何电源/负载.
PX4固件编译命令
make px4fmu-v5_default upload
ArduPilot固件编译命令
./waf configure --board CUAVv5
./waf copter --upload