使用空速传感器
空速传感器是固定翼专用配件,这可以帮助在有风的条件下,缓慢的飞行和自主着陆。
以下部分介绍如何将传感器连接到飞行控制器。 安装空速传感器后,不要忘记校准!
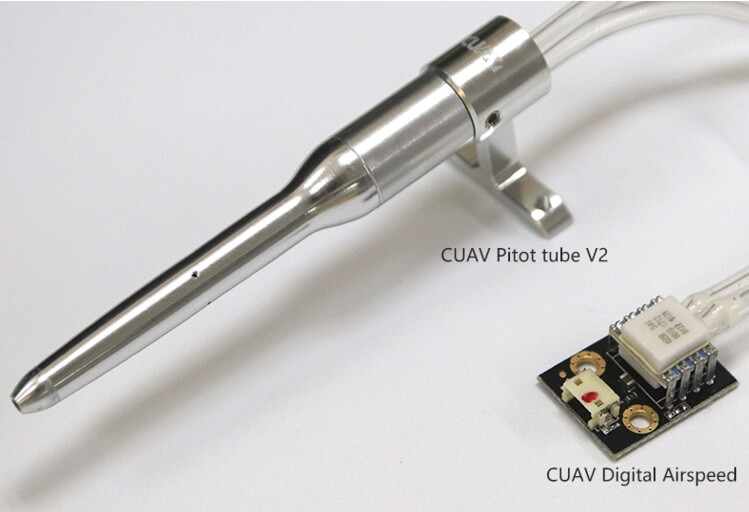
Pixhawk数字空速引脚
Pixhawk可以使用这种数字空速传感器。 将空速传感器连接到Pixhawk的I2C端口(或I2C转接板模块)。
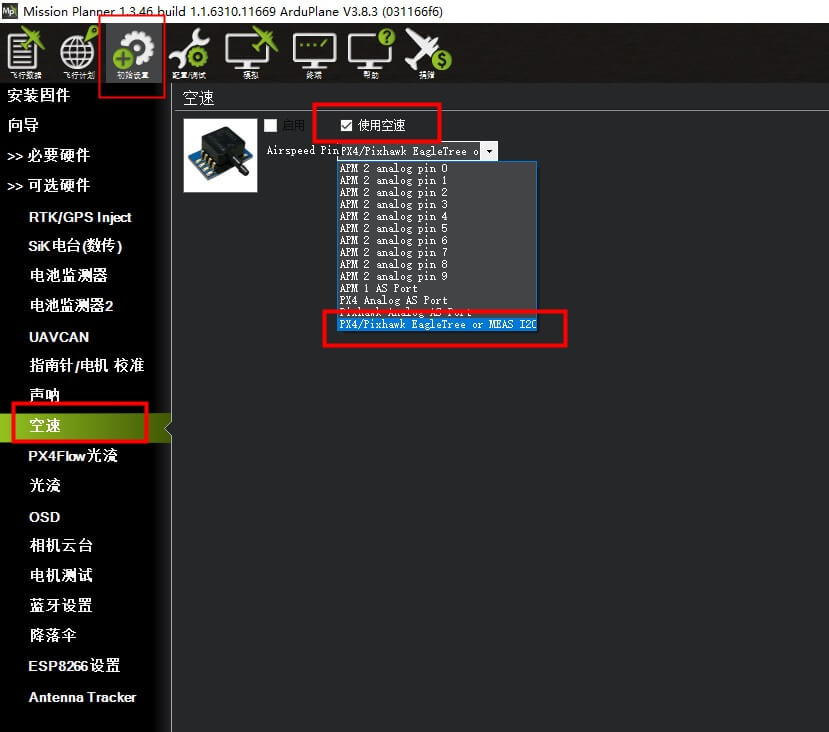
启用数字空速传感器
连接地面站》切换到初始设置部分(Mission Planner |硬件|可选硬件|空速)中选择类型勾选启用,如下图示。
使用模拟空速计
PIXHACK/PIXAHWK支持模拟空速计
pixhack/pixhawk模拟输入引脚
pixhack/pixhawk有2个模拟输入引脚,分别为adc3.3/adc6.6.
cuav 模拟空速计需要连接到pixhack /pixhawk adc 3.3引脚上。
启用模拟空速传感器
连接地面站》切换到初始设置部分(Mission Planner |硬件|可选硬件|空速)中选择pixhawk Analog As port勾选启用。
安装皮托管
将空速传感器放入飞机中时,请皮托管套件。 在EasyStar的情况下,您需要将管子顶部穿过驾驶舱内的泡沫,才可以完全接触到气流(首先在泡沫中钻孔或切割一个小孔)。 确保管子侧面的孔没有被堵塞。 它们应该至少伸出 机头1厘米。 首先将两个出来的管子连接到空速传感器上。 直接从后面出来的管应该进入顶端口,并且以一定角度出来的管应该连接到空速传感器的底端口。

如果您的飞机前方有螺旋桨,必须将皮托管安装在一个机翼上,或者至少在机身下方以避开螺旋桨气流。
校准空速计
手动校准:
将空速计安装后需要进行校准,校准需确保周围没有风,否则会影响校准的效果。
校准操作:连接上mission planner,打开飞行数据界面下的动作栏,点击下方动作选择框选择PREFLIGHT_CALIBRATE点击执行动作(校准过程中切勿动空速计)。

自动校准:为确保安全不建议使用。