本文介绍如何连接到u-center来更改cuav uBlox gps模块的配置。
注意:除非必要修改参数外不要做该操作。
连接方式1 - 通过mission planner和Pixhawk连接
mission planner和pixhawk可以通过执行以下操作建立u-center和GPS之间的通信:
将Pixhawk/pixhack连接到PC,并与任务计划员连接
在飞行数据屏幕上按Ctrl-F,然后选择“MAVSerial pass”
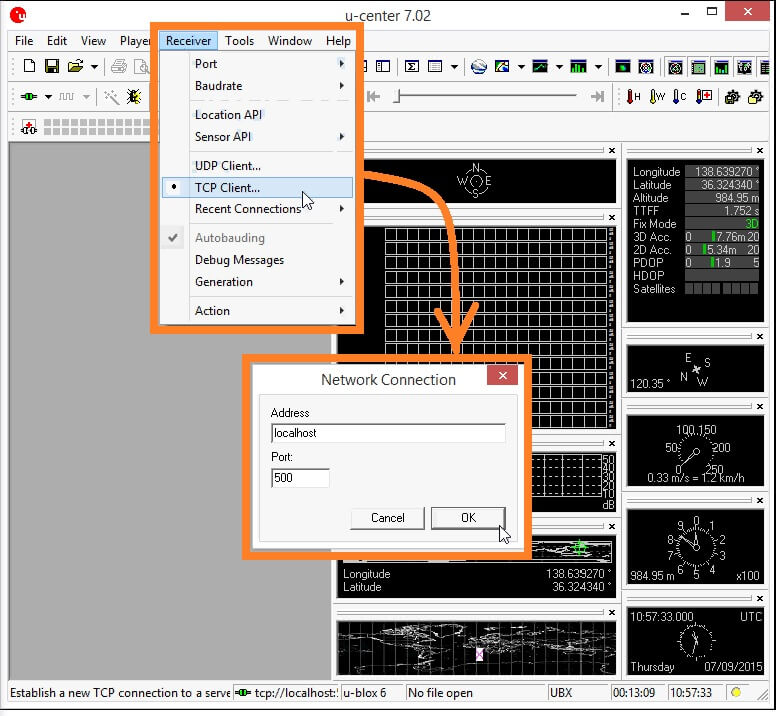
打开u-center并选择Receiver,TCP Client,并在Network Connection窗口中将Address设置为“localhost”,将Port设置为“500”,然后按OK。
请参阅如何使用u-center上传配置文件。

连接方式2:使用ttl小板连接接gps与电脑
 自行做一条ttl小板与gps连接线(接5v,gnd,rx,tx四根线即可,注意两者的rx,tx需要交叉接,电源按照定为接即可)
自行做一条ttl小板与gps连接线(接5v,gnd,rx,tx四根线即可,注意两者的rx,tx需要交叉接,电源按照定为接即可)
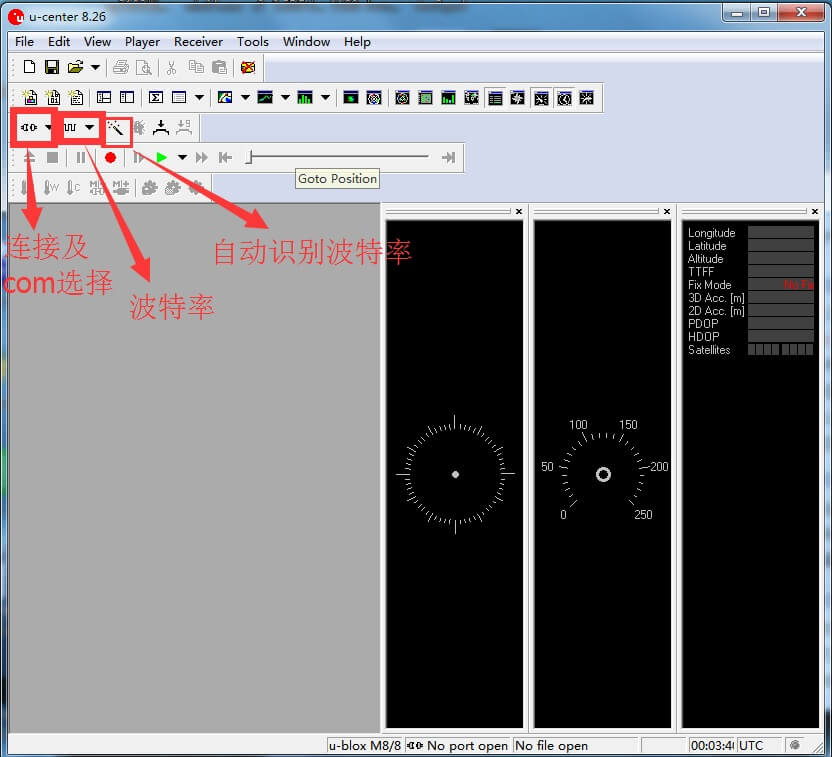
设置好波特率及com即可连接(默认波特率为9600)