NEO 4 Nano Micro GNSS Positioning System
The NEO 4 NANO is a miniature satellite navigation receiver module. It features a highly integrated, compact design incorporating the u‑blox M10 GNSS receiver, supporting concurrent reception of signals from four major global navigation satellite systems. Equipped with a high‑performance STM32H5 processor and an ST IIS2MDC electronic compass, it delivers precise positioning with excellent anti‑interference capabilities and environmental adaptability. It supports an RGB status LED indicator and uses the CAN bus protocol, making it suitable for a wide range of unmanned system applications.

[!NOTE] ArduPilot firmware version 4.0 and later fully supports the NEO 4 NANO.
Data Sheet
| Item | Details |
|---|---|
| Receiver Type | u-blox MIA-M10Q |
| Processor | STM32H5 Arm® Cortex®-M33 250 MHz |
| Compass | IIS2MDC |
| Frequency Band | GPS: L1 C/A GLONASS: L1OF BDS: B1I/B1C Galileo: E1B/C |
| Augmentation Systems | SBAS: EGNOS, GAGAN, MSAS, WAAS, BDSBAS, KASS and SouthPAN QZSS L1S (SLAS) |
| Number of Concurrent GNSS | 4 (BDS, Galileo, GLONASS, GPS) |
| Oscillator | TCXO |
| Acquisition | Cold Start 27s Hot Start 1s Aided Start 1s |
| Nav. Update Rate | Up to 10 Hz (4-concurrent GNSS) Up to 25 Hz (single GNSS) |
| Horizontal Position Accuracy | 1.5 m CEP |
| Signal Integrity | RF interference and jamming detection and reporting Spoofing detection and reporting |
| Wave Filtering | SAW+LNA+SAW+LNA |
| Anti Electromagnetic / Radio Frequency Interference | EMI+RFI |
| Protocol | DroneCAN |
| Upgrade Firmware | Support |
| Firmware | CUAV M4C GNSS |
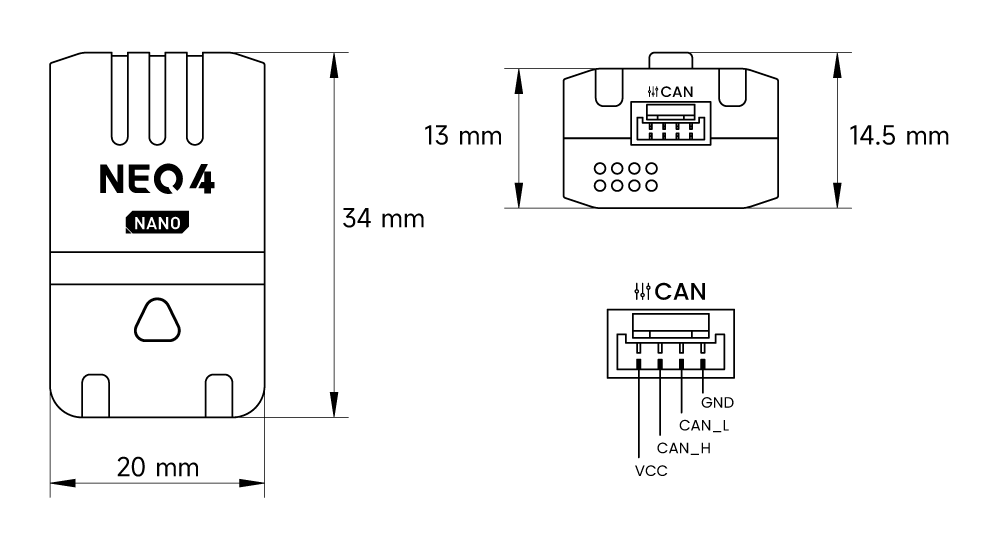
| Data Interface | GHR-04V-S |
| Size | 34 × 20 × 14.5 mm |
| Weight | 10.6 g |
| Input Voltage | 4.5 ~ 5.4 V |
| Operating Temperature | -10 ~ +80 ℃ |
Size and Pinout
Purchase
Connecting to the Controller
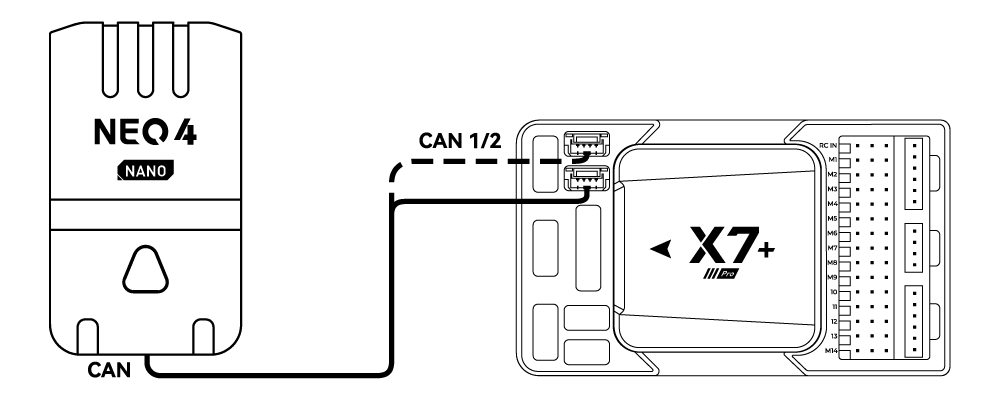
- Connect to the flight controller’s CAN1 / CAN2 port (CAN1 is recommended).
[!TIP] The flight controller must support the DroneCAN protocol, such as ArduPilot and PX4 flight stacks.
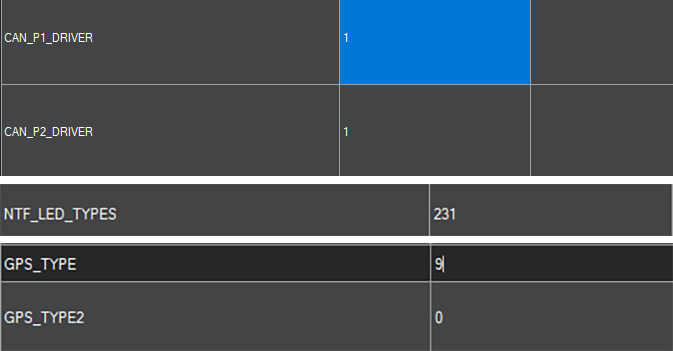
Enable Neo 4 Nano for ArduPilot stack
Set the following parameters in the full parameter list of Mission Planner, then restart the controller after saving the settings:
- Set
CAN_P1_DRIVERto 1. - Set
CAN_P2_DRIVERto 1. - Set
NTF_LED_TYPESto 231. - Set
GPS_TYPE/GPS1_TYPEto 9 (when used as GPS1).
You can realize quick configuration without parameter adjustment via the LGC Ground Control Station.
Custom Parameters for Neo 4 Nano
[!TIP] Under normal circumstances, there is no need to modify the parameter configuration of the Neo 4 Nano, which supports plug-and-play. If parameter modification is required, use the LGC/Mission Planner for the operation.
| Parameter Name | Parameter Description | Default Value | Supplementary Notes |
|---|---|---|---|
| CAN1_FD_BITRATE | CAN interface FD data bit rate (Mbps) | 4 | Consistent with the default value of ArduPilot |
| CAN1_FD_EN_MODE | Controls the FD enable mode of the CAN interface | 2 (Auto CANFD Mode) | 0 = Disable CANFD; 1 = Force enable CANFD; 2 = Auto enable CANFD when specific conditions are met, and the enabled state remains until power off |
| CAN_NODE_ID | Configures the DroneCAN node ID of the module | 0 | 0 means automatic allocation by the system |
| CAN_R | Enables the CAN terminal resistor or not | False (Disabled) | True = Enable the terminal resistor |
| FLASH_BOOTLOADER | Update Bootloader | 0 | Set to 1 to update the old Bootloader, and the parameter will automatically revert to 0 after the update is completed |
| GNSS_ITFM_SEND | Sends GNSS jamming and spoofing detection data via DroneCAN positioning messages or not | 0 | This data is used by PX4; PX4 cannot arm if the signal jamming status is abnormal |
| GNSS_MODE | Sets the satellite navigation systems to be used (mask format) | 111 | Each bit corresponds to a different satellite system; For MIA-M10C, Beidou B1I cannot be enabled at the same time when GLONASS (BIT6) is enabled; Beidou will use the B1C signal when both BIT6 and BIT3 are set |
| GNSS_RATE_MS | Output cycle of CAN positioning-related messages (ms) | 200 | 5 outputs per second by default |
| GPS_TYPE | Compatible with the parameter setting of APM flight controller | 2 | Resolves the issue where the flight controller cannot use DroneCAN positioning messages when APM's GPS_AUTO_CONFIG is set to 2 |
| RGB_BRIGHTNESS | RGB light brightness adjustment | 100 | 100 means 100% brightness; set to 0 to disable the RGB light |
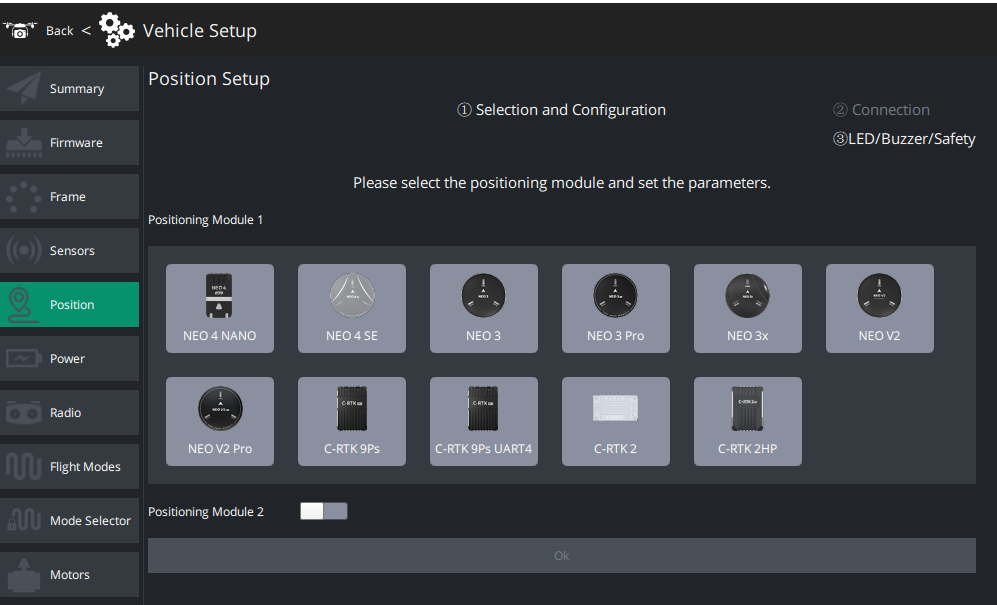
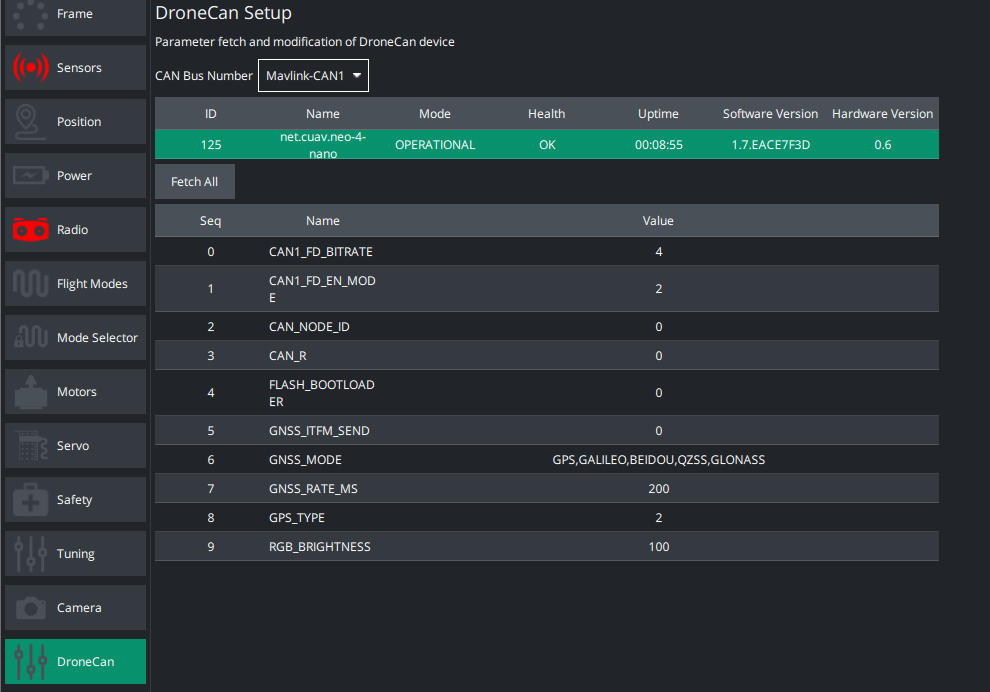
Steps to Modify the Parameter Configuration of Neo 4 Nano via LGC Ground Control Station
- Click the LGC icon in the upper right corner and enter the Dronecan interface under the UAV Settings interface.
- Select the CAN interface number for hardware connection as the CAN bus number.
- Click to select the CAN device to be configured.
- Fetch all parameters.
- Select the parameter to be modified, enter the target value in the pop-up data box, and click Save.
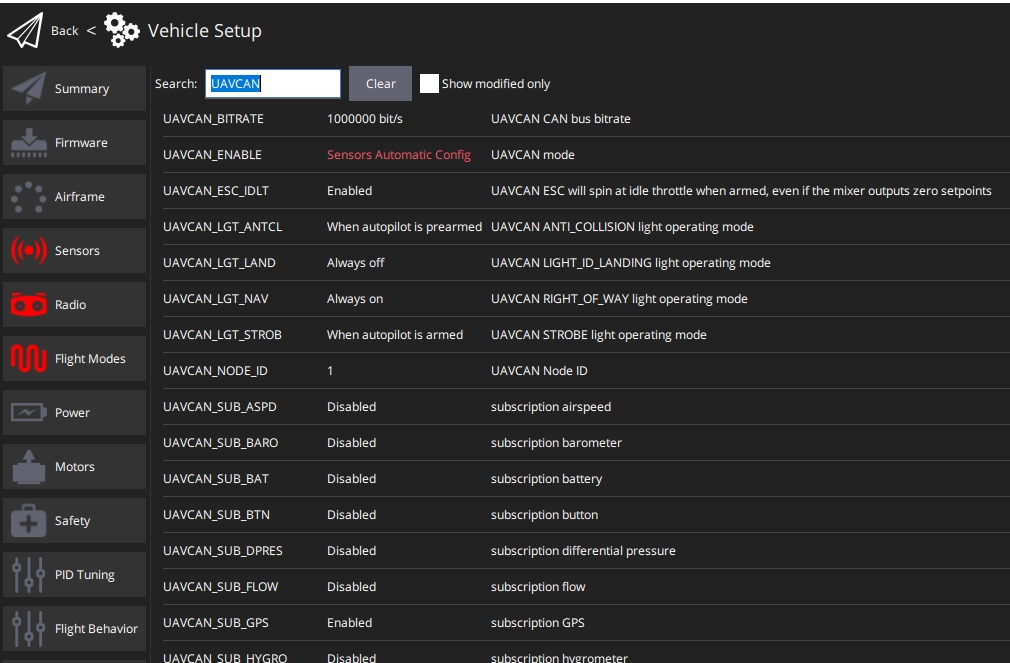
PX4 Firmware
In QGroundControl > Parameters, set the following parameters, write them, and then reboot:
UAVCAN_ENABLEset to Sensors Automatic config.UAVCAN_SUB_GPSset to Enable.