SKYE2 NANO使用指南(PX4)
本章设置和配置适用于将SKYE2应用于运行PX4固件的控制器。
启用SKYE2 NANO
运行QgroundControl>,设置以下参数保存并重启载具。
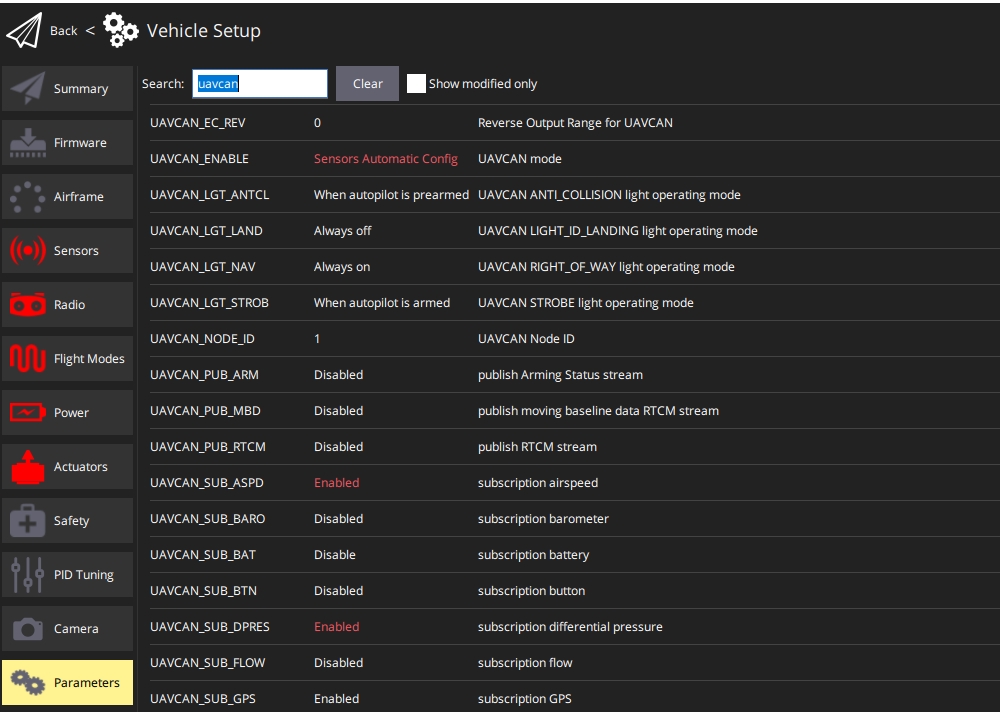
- UAVCNN_ENABLE设置为
Sensors automatic Config - Reboot
- UAVCAN_SUB_ASPD 设置为
Enable - UAVCAN_SUB_DPRES 设置为
Enable - 重启控制器
多个空速计
如果您有多个空速传感器,那么可以使用ASPD_PRIMARY选择哪个传感器作为主要来源,其它传感器作为冗余。
- 0:空速估算(地速减去风速)
- 1:第一个空速传感器(默认)
- 2:第二个空速传感器
- 3:第三空速传感器
空速选择器首先验证启用的传感器,并且仅当启用的传感器未通过空速检查时才切换到其他传感器(使用ASPD_DO_CHECKS来配置检查),然后使用选定的传感器向估计器(EKF2)和控制器提供数据。
空速校准
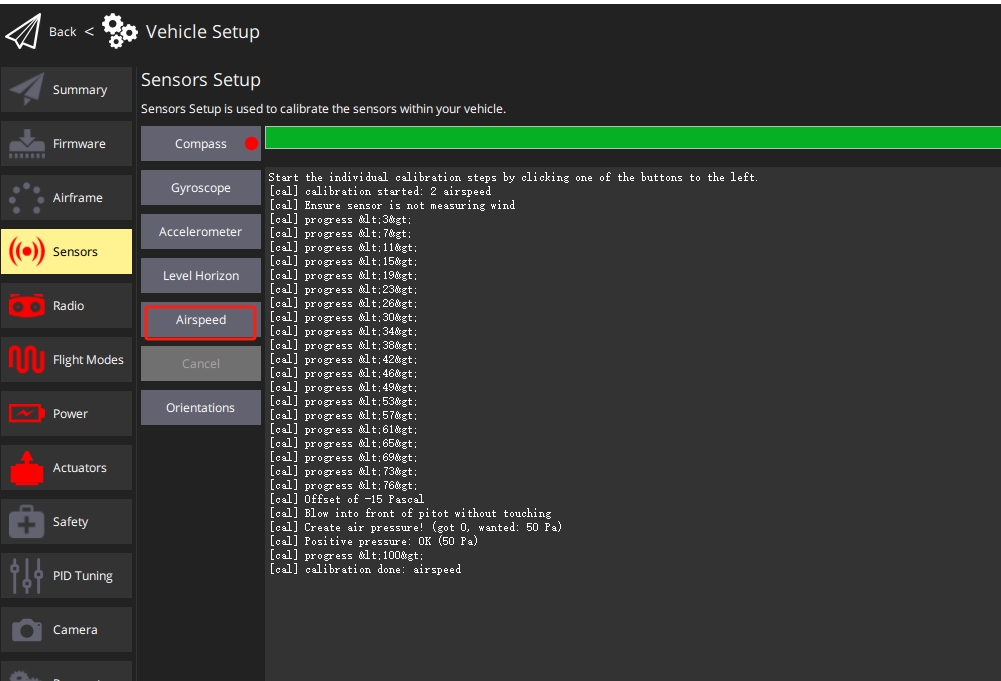
- 选择“Q”图标 > 车辆设置 > 传感器(侧边栏)以打开传感器设置。
- 单击空速传感器按钮。
- 保护传感器不受风吹(即用手捂住)。注意不要堵塞任何孔。
- 单击“确定”开始校准。
- 向皮托管前部吹气,以便检测空速
- 等待QgroundControl提示校准完成
[!NOTE] 如果校准失败,可能是动压管和静压管连接错误,传感器读取到较大的负压差,将其互换。