使用指南(Ardupilot)
本指南适用于运行ArduPilot固件的控制器。
[!Tip] SKYE2支持Ardupilot 4.30及以上版本固件。
飞行控制器参数设置
打开 Mission planner>配置>全部参数表;设置以下参数并保存后重启
- CAN_P1_DRIVER=1
- CAN_P2_DRIVER=1
- CAN_D1_PROTOCOL=1
- CAN_D2_PROTOCOL=1
- ARSPD_TYPE=8
- ARSPD_USE=1
- ARSPD_AUTOCAL=1
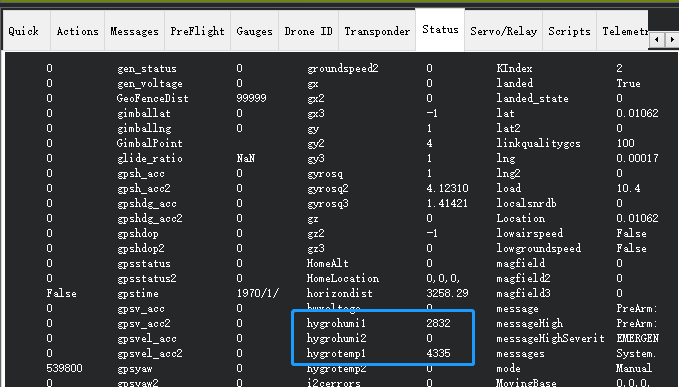
温湿度数据
Ardupilot 4.30及以上版本固件支持温湿度计数据显示:
空速置零(校准空速偏移)
当无风状态下,空速显示大于 3m/s,请在起飞前进行空速置零。
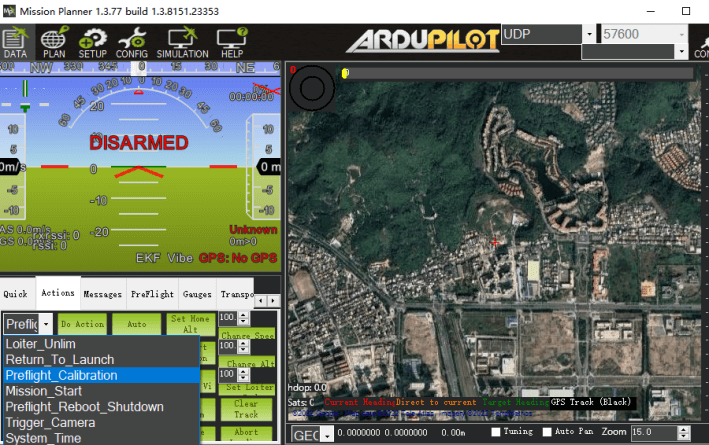
方法:
- 打开Mission planner软件并连接飞行控制器
- 确保当前空速管处于无风环境
- 打开Mission planner>飞行数据>动作栏
- 在第一复选框中选择“Preflight Calibration”;点击右侧“执行动作“按钮
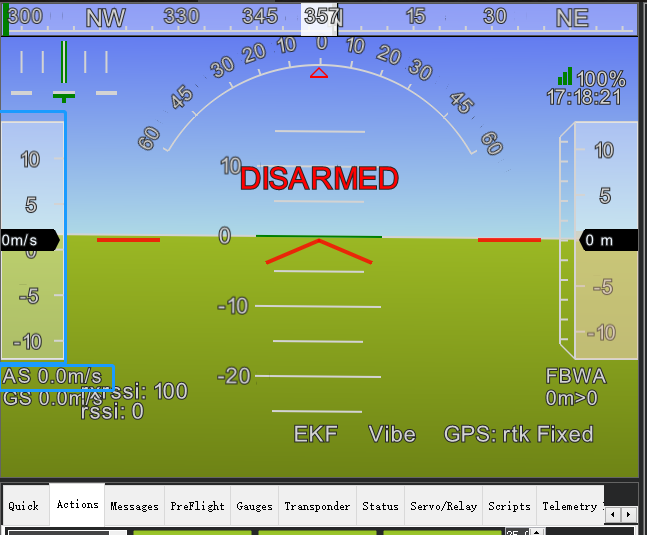
飞行前检查
飞行前请连接上地面站检查无风状态下,确保空速值在0~3m/s之间的范围内跳动(超出范围请进行空速置零)
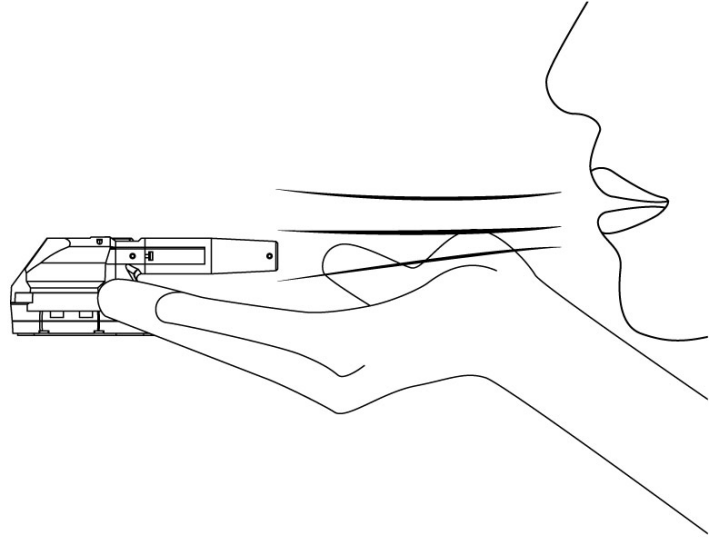
- 用手托住空速管,往空速管吹气,查看空速数值能够根据气流速度变化,则表示检查完成。
空速校准
不同的安装及不同空速计个体的空速比例会有些差异,在第一次飞行需进行空速计校准; 将飞行控制器参数ARSPD_AUTOCAL设置为1开启自动校准 执行校准(以下两种方式二选一):
1.以 QStabilize或QLoiter多轴模式升空并转换为FBWA(自稳A模式)控制无人机飞行盘旋5圈左右,地面站消息栏提示校准完成后,执行降落。 2.如果您不会使用FBWA模式飞行,可以采用使能空速计但不使用空速计的方法飞行(ARSPD_USE=1;ARSPD_TYPE=8;请勿在风速较大的环境下进行此操作);飞机将使用地速(相对地面速度)飞行,起飞后使用Loiter模式盘旋5圈左右,地面站消息栏提示校准完成后,执行降落。