PX4固件使用须知
本章将描述X7系列运行ArduPilot固件时需要注意的要点,除本章外您可能还需要阅读以下内容:
加载固件
X7系列®控制器支持PX4,下面主要讲解如何加载PX4固件。
[!TIP] X7系列兼容PX4 v1.12.3及以上版本固件.
在线烧录固件:
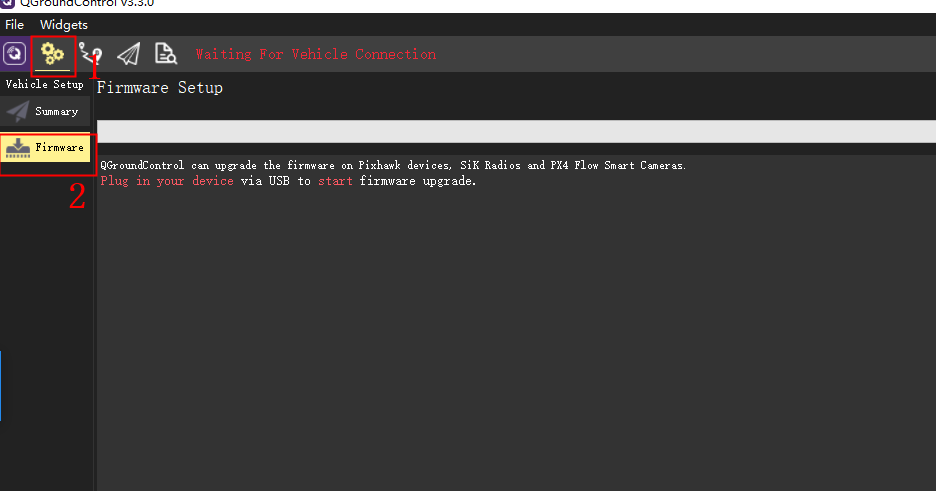
将控制器接入到电脑,打开QGroundControl地面站,点击设置图标》点击firmware.
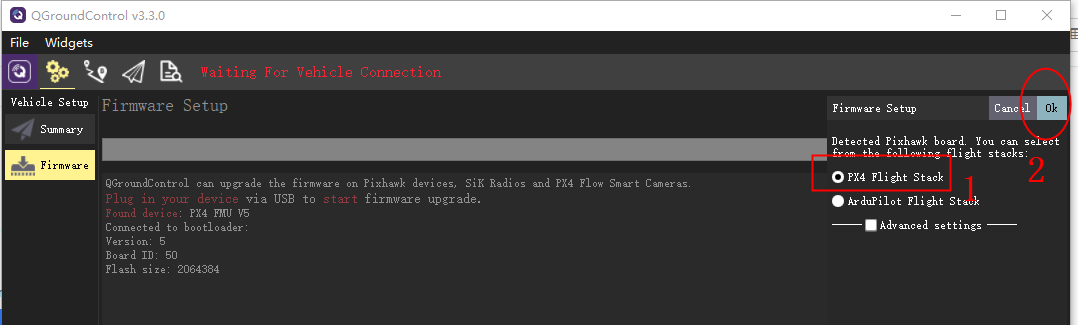
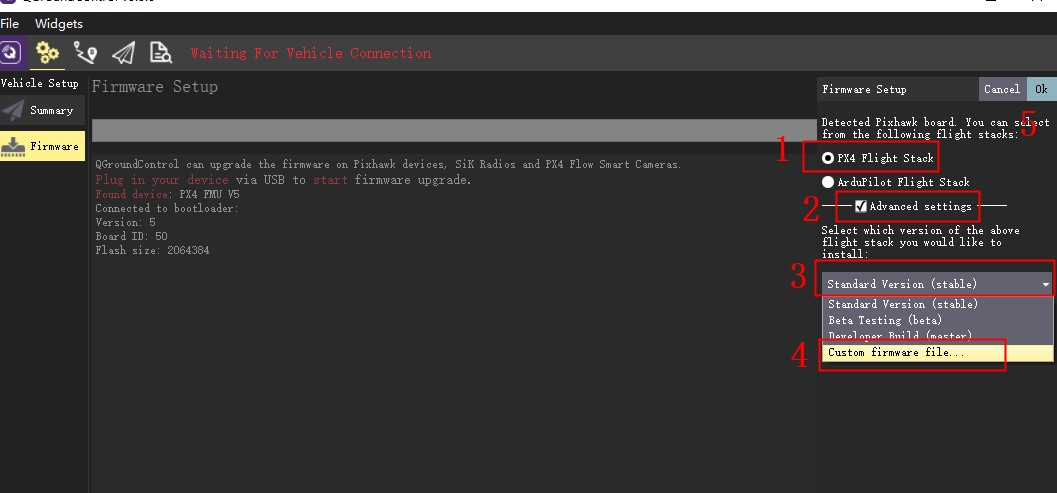
将控制器通过usb线连接到电脑,地面站右边将弹出下图窗口》选择需要PX4 Flight STACK》OK
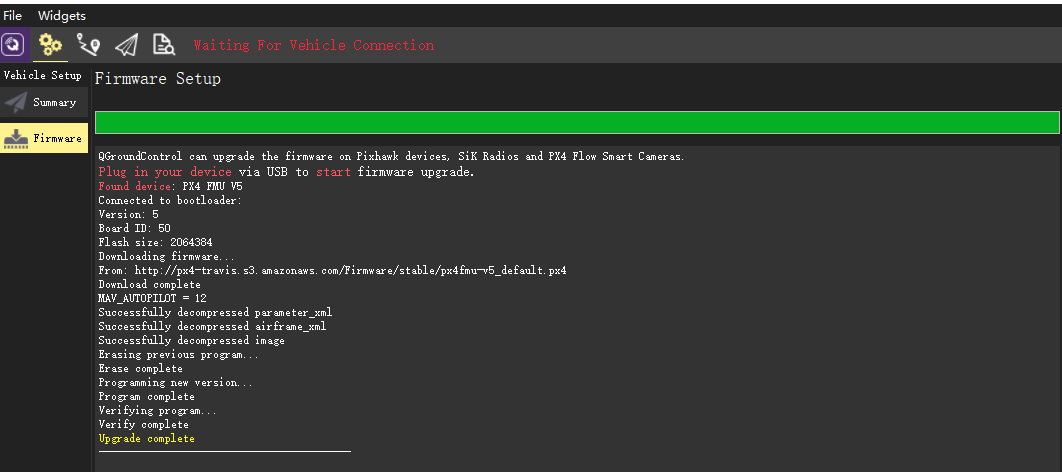
加载完成,如不进行操作,十几秒后将自动连接。
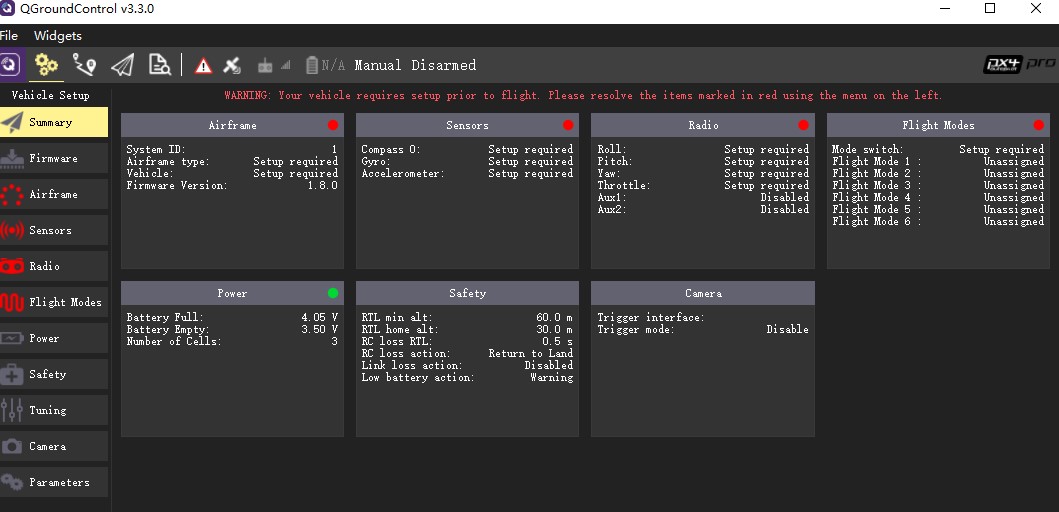
[!NOTE] QGC 4.10.0(不含)以上版本地面站兼容X7/Nora控制器,如果使用较低的版本,需要手动建立连接并且无法刷写固件。
本地烧录:
- 请先下载X7+/X7+ PRO 或Nora/Nora+ 固件到本地。
- 打开地面站》点击设置图标》点击firmware
将智能控制器通过usb线连接到电脑,地面站右边将弹出下图窗口》选择需要PX4 Flight STACK》勾选advanced settings>custon firmware file》找到下载的固件》ok
加载完成,如不进行操作,十几秒后将自动连接。
Serial映射
| UART | Device | Port |
|---|---|---|
| USART1 | /dev/ttyS0 | GPS1 |
| USART2 | /dev/ttyS1 | TELEM1 |
| USART4 | /dev/ttyS2 | GPS2 |
| USART6 | /dev/ttyS3 | TELEM2 |
| UART7 | /dev/ttyS4 | Debug Console |
| UART8 | /dev/ttyS5 | RC |
编译固件
[!NOTE] 大多数用户不需要编译固件,直接通过 QGroundControl 在线刷写固件即可。
编译命令
X7/X7 Pro/X7+/X7+ Pro
make cuav_x7pro_default
Nora/Nora+
make cuav_nora_default
支持的框架类型
常见的多旋翼/固定翼/垂直起降固定翼/无人车或船。 完整的支持配置集可以在 Airframes Reference 中看到。
电源模块设置
X7系列控制器套装包含CAN PMU Lite电源模块,CAN PMU Lite连接到Power C。
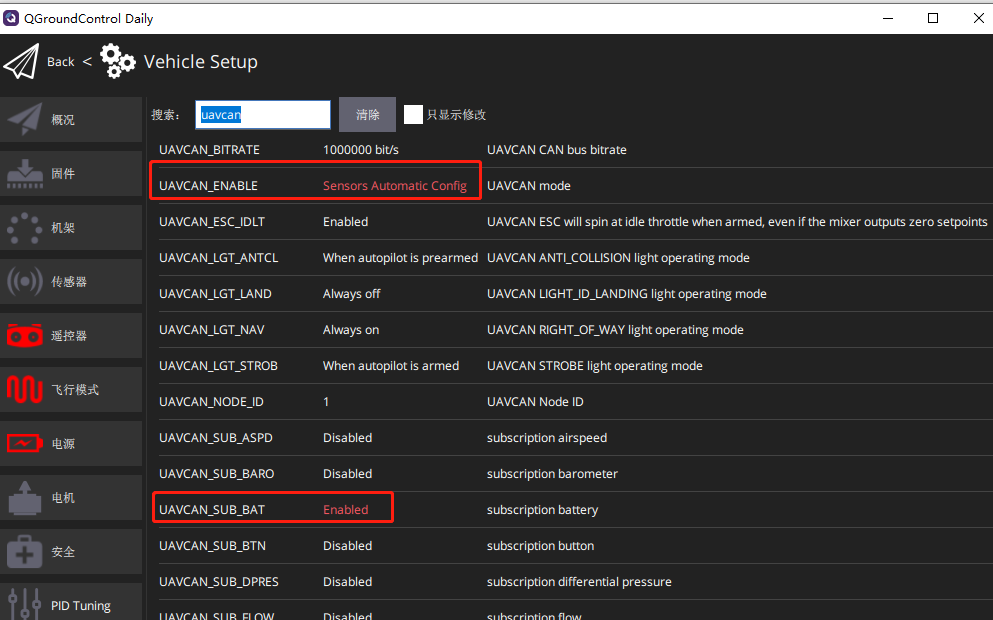
- 连接到QGC地面站》设置》参数设置
- 将UAVCAN_ENABLE参数设置为Sensors Automatic config
- 将UAVCAN_SUB_BAT参数设置为Enabled
- 写入参数并重启
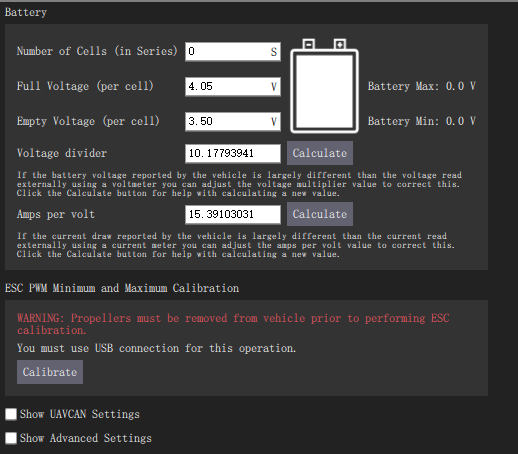
如果您使用模拟电池监测器(例如HV_PM),请连接至Power A接口,并设置以下参数:
- 填写电芯数量
- 单节满电压(一般锂电池设置为4.0~4.2v)
- 分压比根据厂商提供的数据填写{18(HV_PM)}
- 电流电压比根据厂商提供的数据填写(24(HV_PM)
开发指南
[!NOTE] CUAV不提供固件及软件二次开发技术指导,如有相关问题,请仔细阅读相关指南。