Nora/Nora+快速布线
本快速布线指南介绍了如何为Nora/Nora+控制器供电并连接其最重要的外围设备。

[!TIP] 以下内容适用于Nora和Nora+。
硬件连接概况
下图显示了Nora+ 最重要的外设连接。
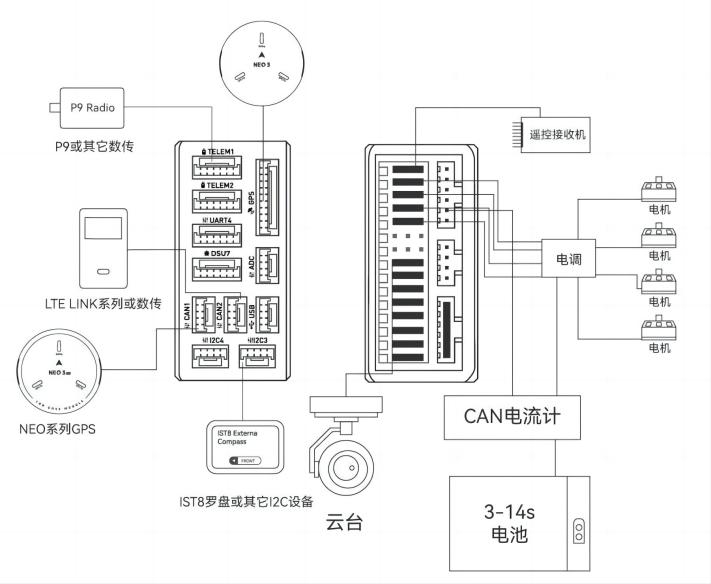
| 主要接口 | 功能及用途 |
|---|---|
| POWER A | 连接电源PM模块;具有电源输入&AD电压电流检测功能(默认使用该接口) |
| POWER C | 请将CAN PMU SE连接到此接口;该接口连接Dronecan电源模块 |
| GPS&SAFETY | 连接Neo Gps,它包含GPS、安全开关、蜂鸣器接口 |
| UART 4 | 可用于连接GPS,可作为第二个GPS |
| TELEM1/TELME2 | 连接数传等,用于MAVLINK交互数据 |
| TF CARD | 插入SD卡,可实现日志存储功能 |
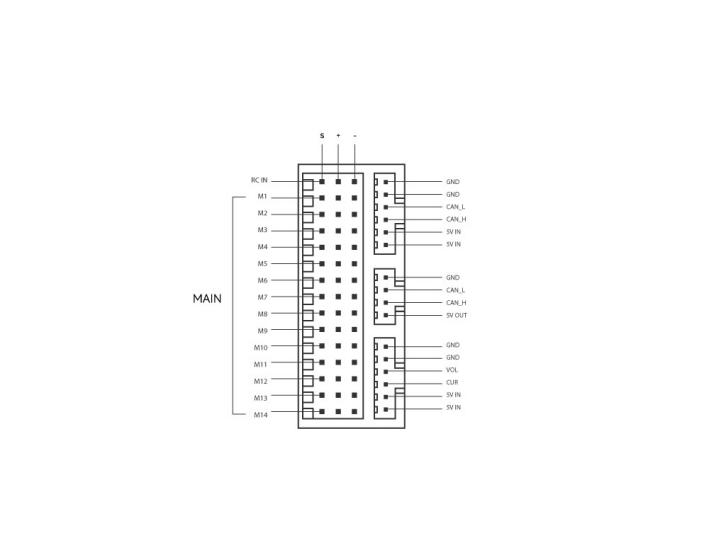
| M1~M14 | PWM信号输出口,可用于控制电机或舵机;并且M1~M12还支持dshot协议 |
| DSU7 | 用于FMU芯片调试,读取DEBUG设备信息 |
| TYPE-C(USB) | 连接电脑,用于飞控与电脑的通信,比如烧录固件 |
| USB | 连接电脑,用于飞控与电脑的通信,比如下载日志 |
| I2C1/I2C2/i2C4 | 连接外置指南针等I2C设备,用于飞控与I2C设备的通信 |
| CAN1/CAN2 | 连接CAN GPS等Dronecan设备,用于飞控与UAVCAN设备的通信(比如连接NEO V2 pro uavcan GPS) |
| RC IN | 包含DSM、SBUS、RSSI信号输入接口,DSM接口可以连接DSM卫星接收机、SBUS接口连接SBUS遥控器接收机 |
| RSSI | 用于连接信号强度回传模块 |
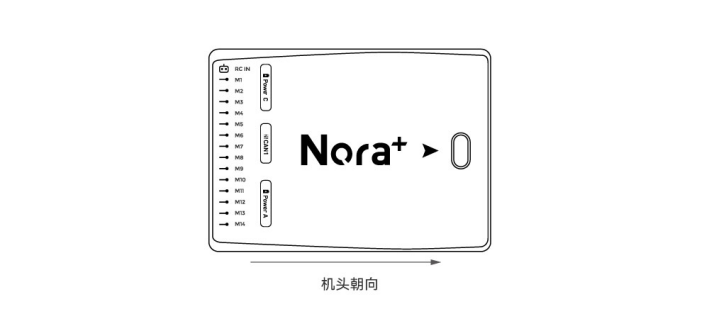
机头朝向
[!Comment] 默认情况下,箭头指向飞机前方,安装时保证箭头指向机架前方。如果控制器不以推荐/默认方向安装(比如空间限制),则需要配置飞行控制器方向(PX4固件点击 这里, Ardupilot固件点击这里).
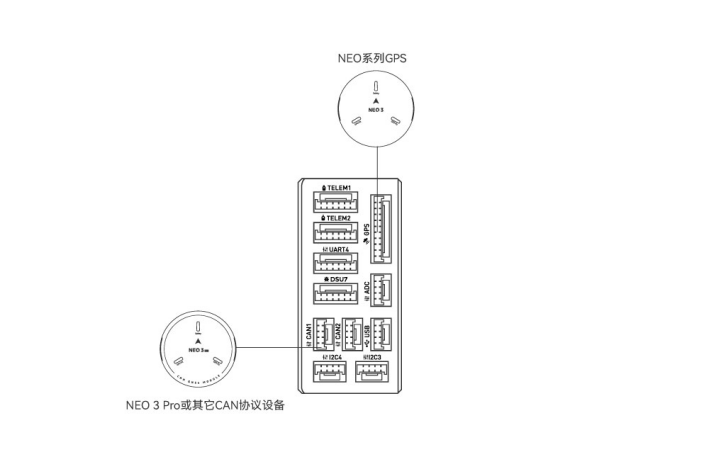
GPS定位系统
我们推荐您使用Dronecan GPS/RTK(比如 Neo 3 pro;您只需要将它连接到CAN 1/2接口;您也可以使用普通的GPS/RTK模块;将其连接到GPS接口即可;现在常用的GPS模块一般集成了GPS、罗盘、安全开关、蜂鸣器、LED状态灯。 GPS模块应装在支架上,并远离其它电子设备。安装方向朝向载机前方(NEO GPS箭头与飞控箭头方向一致)。
安全开关
[!TIP] 当您使用NEO系列GPS时,无需额外安装安全开关。
如果您在没有GPS的情况下飞行,您必须将开关直接连接到GPS1端口,以便能够对无人机进行解锁和飞行。(如果使用旧式6针GPS,请查看最下方接口定义进行改线).
蜂鸣器
[!NOTE] 当您使用NEO系列GPS时,无需额外安装安全开关。
如果您使用其它制造商的普通GPS模块,可能会存在蜂鸣器无法工作的问题。您可能需要外接一个蜂鸣器替代它。
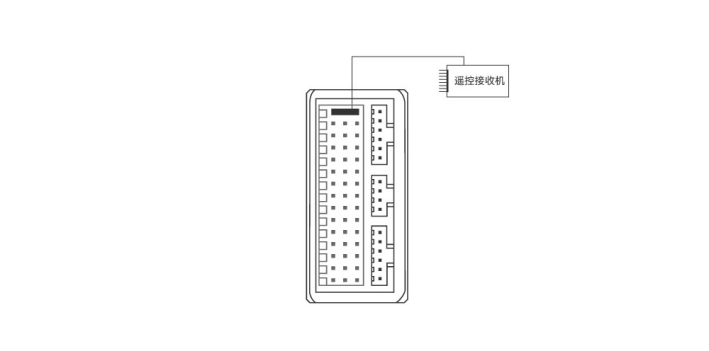
遥控器
为了您的飞行安全,建议您无论手动飞行还是自动飞行,请连接手持遥控器(可作为应急救机使用,除非您未熟练操作手持遥控器)。
下图显示了,您如何接入您的遥控器接收机(请找到套装内的杜邦线)
电源
Nora+ 配带有CAN PMU Lite模块,它支持3~14s的锂电池,请把模块的6pin连接器连接到飞控Power C接口。
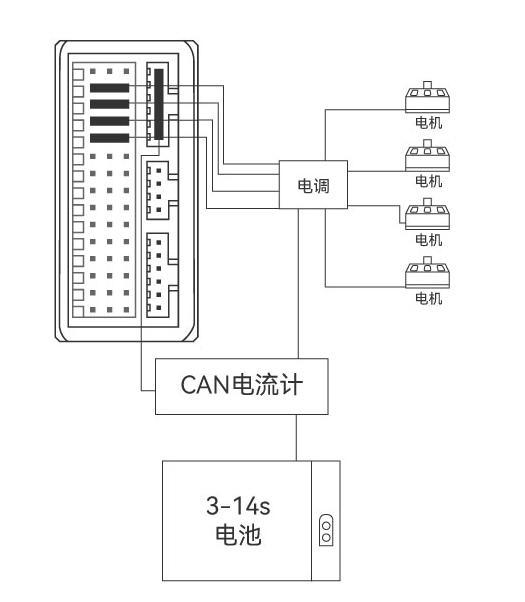
[!NOTE] X7系列飞控默认参数配置好CAN电流计配置,您无需在软件上进行电池检测器配置;只需要将CAN PMU se连接到Power C即可。
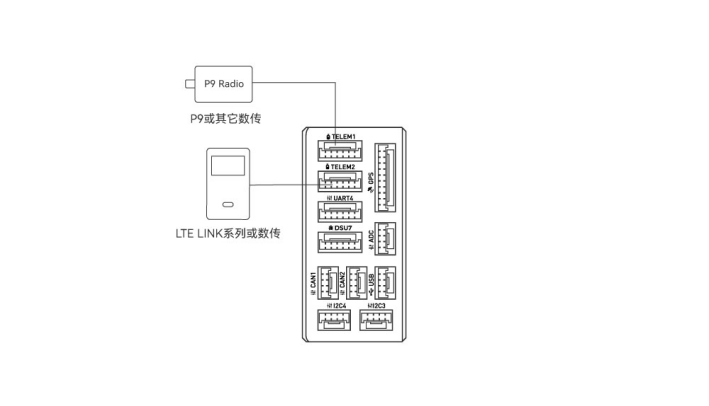
遥测(数传)系统
使用遥测系统您可以通过地面站软件与无人机通信。监控和控制飞行中的无人机。
遥测系统机载端应连接到TELEM1/TELEM2接口.
SD卡
Nora+在出厂时SD卡已经安装好,您无需进行安装。
电机
电机/伺服系统按照机身参考中为您的载机指定的顺序连接到M1~M14接口。
舵机供电
Nora+的servo接口与控制器内部电源时完全隔离的,控制器
不会为舵机供电;如果您需要为舵机供电,请将BEC连接到M1~M14的任意一列正负级中(M1~M14的正负时相通的);然后将舵机接入即可。
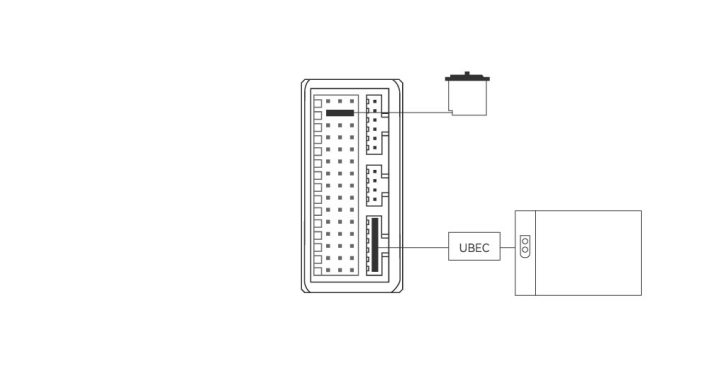
[!TIP] Nora+支持Servo电压监测,最大支持10V输入。