QuadPlane auto task
You can ask the QuadPlane code to perform AUTO tasks, including a mix of automatic vertical take-off to fixed-wing and VTOL road signs, and automatic vertical landing and landing. The result is a multipurpose aircraft that can perform remote missions for vertical takeoffs and landings.
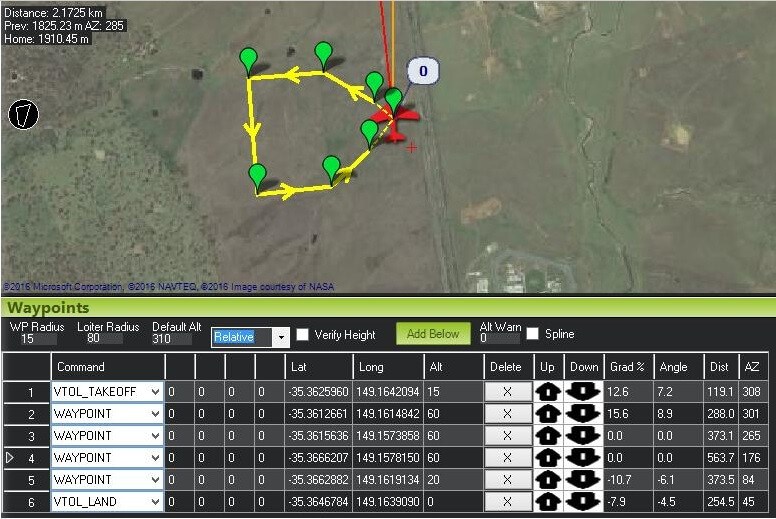
AUTO VTOL take off
The most common VTOL task command in QuadPlane is VTOL auto take off. To let the VTOL for take off, you need to use the ground station task editor to schedule automatic tasks as usual, instead of using the fixed-wing NAV_TAKEOFF command, use the NAV_VTOL_TAKEOFF command to take off the VTOL.
The only parameter for NAV_VTOL_TAKEOFF is the altitude after take-off. Once this altitude is reached, the aircraft will move to the next waypoint and switch to fixed-wing flight as needed. The latitude and longitude of the NAV_VTOL_TAKEOFF command need not be set.
AUTO VTOL Landing
There are several ways to perform automatic VTOL landings. The simplest is to add a NAV_VTOL_LAND command to the task. The height of this command should be 0 and have the latitude and longitude of the landing position.
When using NAV_VTOL_LAND, it is important to maintain a proper horizontal spacing between the waypoint and the previous waypoint. Once the aircraft is launched on the NAV_VTOL_LAND waypoint, it will convert to a vertical take-off and landing flight, which means that it will start to fly far below the fixed-wing flight speed. So you need to put the previous waypoint and landing point at the appropriate distance. If it is too far from the landing point, the aircraft will spend a lot of time flying vertically, which will waste battery power. If it is too close to the landing point, it will have to stop suddenly and land.
For most small QuadPlanes, the distance from the last waypoint to the landing point of 60 to 80 meters is more appropriate. For faster QuadPlanes, you will need more distance.
Also make sure that the height of the final destination is within the reasonable height of the landing. The vertical landing landing method will start at any height at the beginning of the NAV_VTOL_LAND waypoint command. So the best waypoint is more than 20m above the ground.
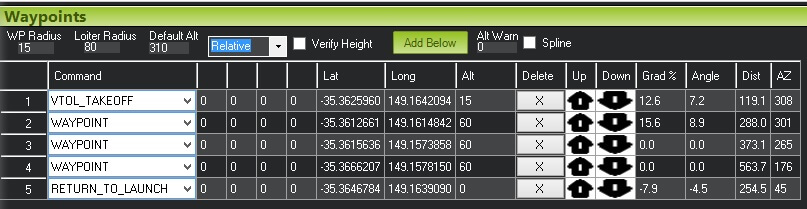
Return flight
Another way to use the NAV_VTOL_LAND command is to use the RETURN_TO_LAUNCH command and set the Q_RTL_MODE parameter to 1.
The advantage of using RETURN_TO_LAUNCH with the Q_RTL_MODE setting is that the aircraft will automatically use the fixed wing to fly until it reaches the RTL_RADIUS at the return point. This makes it easier to land scheduled landing missions from vertical landing gear anywhere in the flight area.
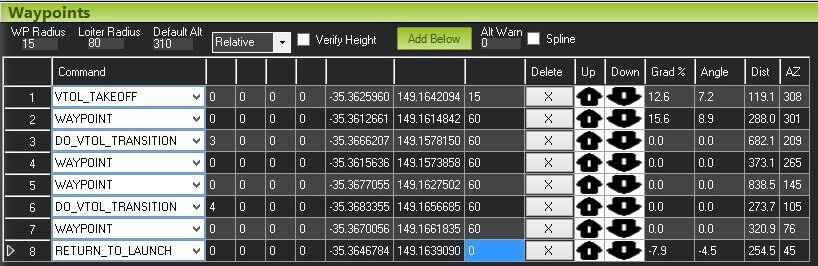
Mixed vertical takeoff and landing and fixed wing flight
To mix fixed-wing and vertical takeoff and landing in one mission, you can use the DO_VTOL_TRANSITION command in the task. The DO_VTOL_TRANSITION command takes a single parameter. If the parameter is set to 3, the aircraft will change to VTOL mode. If the parameter is set to 4, it will become fixed wing mode.
In the above example, the aircraft will take a VTOL takeoff and then fly as a fixed-wing aircraft to No. 1 waypoint. Then, it will switch to the vertical take-off and landing mode, and will use the waypoints 4 and 5 as the vertical takeoff and landing aircraft, then it will switch back to the fixed wing to reach the waypoint 7, and then finally fly home and landing as a vertical landing gear. (Suppose Q_RTL_MODE is set to 1).
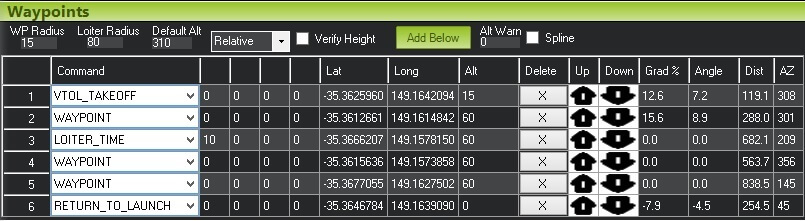
Hovering in the mission
By setting the Q_GUIDED_MODE parameter to 1, your rotor motor will process idle commands in GUIDED mode and AUTO tasks in VTOL aircraft. For example, the following tasks:
The aircraft will hover at waypoint 3 for 10 seconds. It will serve as the rest of the fixed-wing aircraft mission. This is useful for getting good photos from many locations in one mission, while flying most of the missions as efficient fixed-wing aircraft.
Guide mode
In addition to AUTO mode, QuadPlane can also be used in GUIDED mode. To use VTOL support in GUIDED mode, you need to set the Q_GUIDED_MODE parameter to 1. When set, the behavior of the GUIDED mode will change to keep the VTOL hover instead of the fixed wing circle at the target position.
The way to navigate the waypoint will be completed as a fixed-wing aircraft. The transition to VTOL flights will begin with a WP_LOITER_RAD radius (meters). This should suit your plane. The 80 meter value applies to all kinds of QuadPlanes.
When hovering at the destination in GUIDED mode, if there is a new GUIDED destination, the aircraft will switch back to the fixed wing, fly to the new position, and then hover again in the vertical takeoff and landing mode.