QuadPlane自动任务
您可以要求QuadPlane代码执行AUTO任务,包括从自动垂直起飞到固定翼和VTOL路标以及自动垂直起降着陆的混合。 其结果是一架能够进行垂直起飞和着陆的远程任务的多用途飞机。
AUTO VTOL起飞
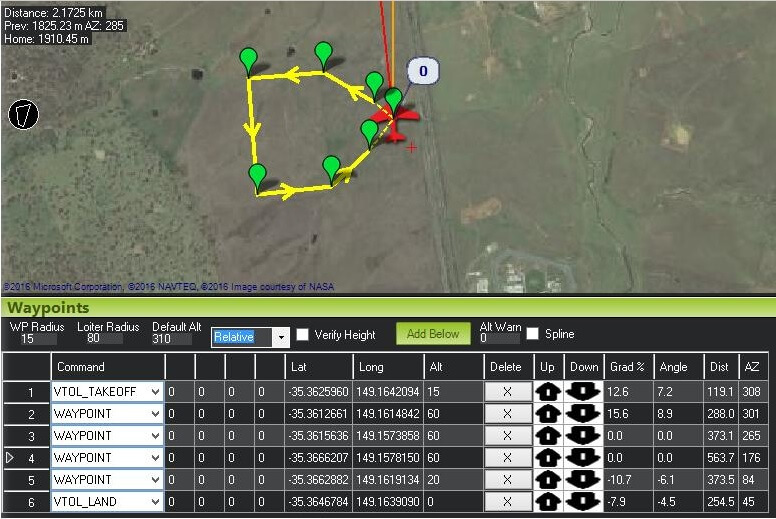
QuadPlane中最常见的VTOL任务命令是VTOL自动起飞。 要使用VTOL起飞,你需要像往常一样使用地面站任务编辑器计划自动任务,不是使用固定机翼起飞的NAV_TAKEOFF命令,而是使用NAV_VTOL_TAKEOFF命令来起飞VTOL。
NAV_VTOL_TAKEOFF的唯一参数是在起飞完成后的高度。 一旦达到该高度,飞机将移动到下一个航点,根据需要转换到固定机翼飞行。 NAV_VTOL_TAKEOFF命令的经度和纬度不用设置。
AUTO VTOL着陆
有几种方法可以执行自动VTOL着陆。最简单的是在任务中添加一个NAV_VTOL_LAND命令。该命令的高度应为0,并具有着陆位置的经度和纬度。
在使用NAV_VTOL_LAND时,在航点和前一航点之间保持合适的水平间距非常重要。一旦飞机在NAV_VTOL_LAND航点上启动,它将转换为垂直起降飞行,这意味着它将开始以远低于固定翼飞行速度飞行。所以你需要把前一个航点和着陆点放在合适的距离上。如果距离着陆点太远,飞机将花费大量的时间在垂直起降飞行,这将浪费电池电量。如果太靠近着陆点,那么它将不得不突然停下来降落。
对于大多数小型QuadPlanes而言,从最后一个航点到着陆点60到80米之间的距离比较合适的。对于飞行速度更快的QuadPlanes,您将需要更大的距离。
还要确保最后航点的高度选择在着陆的合理高度之内。垂直起降着陆方法将在NAV_VTOL_LAND航点命令开始时任何高度开始。所以 最好上一个的航点距离地面高于20m。
返航
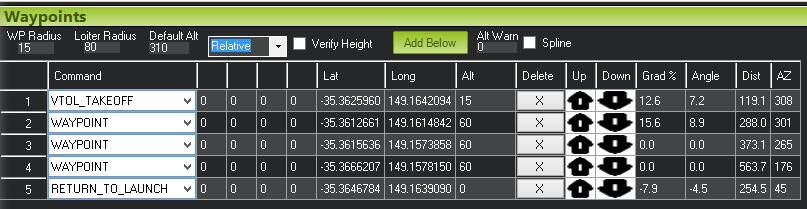
另一种使用NAV_VTOL_LAND命令的方法是使用RETURN_TO_LAUNCH命令,并将Q_RTL_MODE参数设置为1。
与Q_RTL_MODE设置一起使用RETURN_TO_LAUNCH的优点是,飞机将自动使用固定机翼飞行,直到它到达返回点的RTL_RADIUS。 这使得从飞行区域任何地方的垂直起落架降落计划任务变得更容易。
混合垂直起降和固定翼飞行
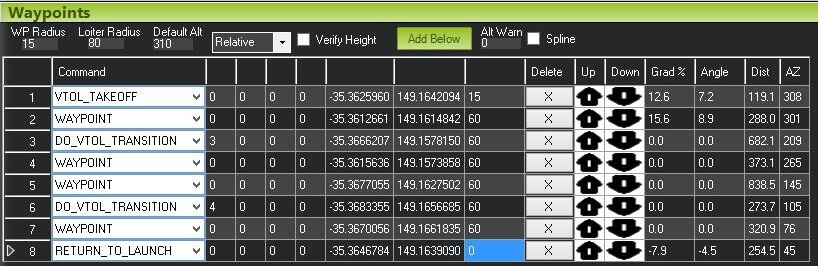
要在一个任务中混合固定翼和垂直起降飞行,您可以在任务中使用DO_VTOL_TRANSITION命令。 DO_VTOL_TRANSITION命令采用单个参数。 如果参数设置为3,那么飞机将改变为VTOL模式。 如果参数设置为4,那么它将变成固定翼模式。
在上面的例子中,飞机将进行VTOL起飞,然后作为固定翼飞机飞到1号航点。 然后,它将切换到垂直起降模式,并通过航点4和5作为垂直起降飞机飞行,然后它将切换回固定机翼飞行到达航点7,然后最终飞回家并作为垂直起落飞机着陆(假设Q_RTL_MODE设置为1)。
在任务中盘旋
通过将Q_GUIDED_MODE参数设置为1,您的旋翼电机将在GUIDED模式下处理空闲命令,在VTOL飞机中处理AUTO任务。 例如,以下任务:
飞机将在航点3悬停10秒钟。它将作为固定翼飞机飞行任务的其余部分。 这对于在一个任务中获得许多地点的好照片非常有用,同时将大部分任务作为高效的固定翼飞机进行飞行。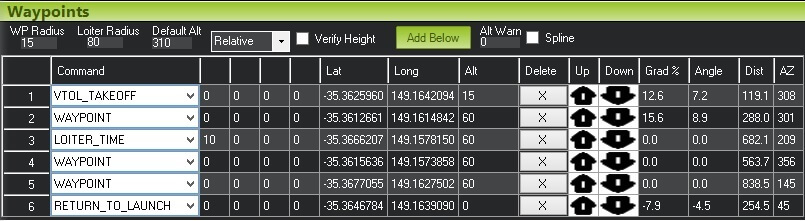
引导模式
除AUTO模式外,还可以在GUIDED模式下使用QuadPlane。 要在GUIDED模式下使用VTOL支持,您需要将Q_GUIDED_MODE参数设置为1.设置时,GUIDED模式的行为将会更改,以便在目标位置保持为VTOL悬停而不是固定的翼形圆。
导航航点的方法将作为固定翼飞机完成。 飞往VTOL航班的过渡将以WP_LOITER_RAD半径(米)开始。 这应该适合你的飞机。 80米的值适用于各种QuadPlanes。
当在GUIDED模式下悬停在目的地时,如果有新的GUIDED目的地,那么飞机将转回到固定机翼飞行,飞到新的位置,然后再次悬停在垂直起降模式。