V5飞行控制器
V5飞行控制器已经停产,建议您选用V5+飞行控制器
全新的V5 CORE 平台
V5 AutoPilot采用了全新的V5 CORE平台;将飞控核心部分集成于V5 core上,底板可拆卸,只作为对外接口载体,给予消费者定制化的空间,用户可根据自身需求自行设计自己的底板。
全新的开源硬件设计
V5 AutoPilot是CUAV基于FMU V5开源硬件全新打造的高性能飞行控制系统。FMU v5开源硬件的特点就是采用比FMU V3更加先进的处理器、更大的flash及RAM、更稳定可靠的传感器。
更快的处理器
在硬件配置上,V5 AutoPilot抛弃了px4家族原有的STM32F427处理器而选用了更为高级的STM32F765处理器,其主频高达216MHZ并且含有2MB FLASH/512K RAM,主频更高,RAM更大,速度将实现大幅度提升。
更稳定的传感器
传感器方面V5 AutoPilot与pixhawk3一样,同样采用三度冗余imu,但其选用了更为稳定的ICM-20602/ICM-20689/BMI055/IST8310等传感器,提高了其在不同温度下的适应能力。
除此之外,V5还具有以下优势:
1、支持RTK厘米定位;
2、模块化设计方便集成;
3、内置3组IMU冗余;
4、丰富的I/O端口;
5、金属外壳内置减震;
6、支持众多丰富机型。
硬件参数
| 硬件参数 | |
|---|---|
| 主处理器 | STM32F765 (32 Bit Arm® Cortex®-M7, 216MHz, 2MB flash, 512KB RAM) |
| 协处理器 | STM32F100 (32 Bit Arm® Cortex®-M3, 24MHz, 8KB SRAM) |
| 传感器 | |
| 加速计 | ICM-20602/ICM-20689/BMI055 |
| 陀螺仪 | ICM-20602/ICM-20689/BMI055 |
| 电子罗盘 | IST8310 |
| 气压计 | MS5611 |
| 接口 | |
| UART串口 | 5 |
| I2C | 4 |
| PWM输出 | 标准8 PWM IO+6个可编程IO |
| 遥控器信号输入协议 | PPM/SBUS |
| RSSI输入 | PWM或3.3模拟电压 |
| CAN标准总线 | 2 |
| 电流电压输入 | 2 |
| 安全开关 | 1 |
| GPS接口 | 1 |
| Debug/F7 SWD接口 | 1 |
| USB接口 | 1(Type-C) |
| SPI接口 | 1 |
| 支持机型 | |
| PX4固件 | 固定翼/3-8旋翼/直升机/VTOL垂直起降/无人车/无人船等 |
| 工作环境及物理参数 | |
| PM工作电压 | 4.5 ~ 5.5 V |
| USB电压 | 5V +- 0.25v |
| 伺服输入 | 0-36v |
| 工作温度 | -40 ~ 85°c |
| 尺寸 | |
| 长X宽X高 | 89*42.5*33mm |
| 重量 | 90g |
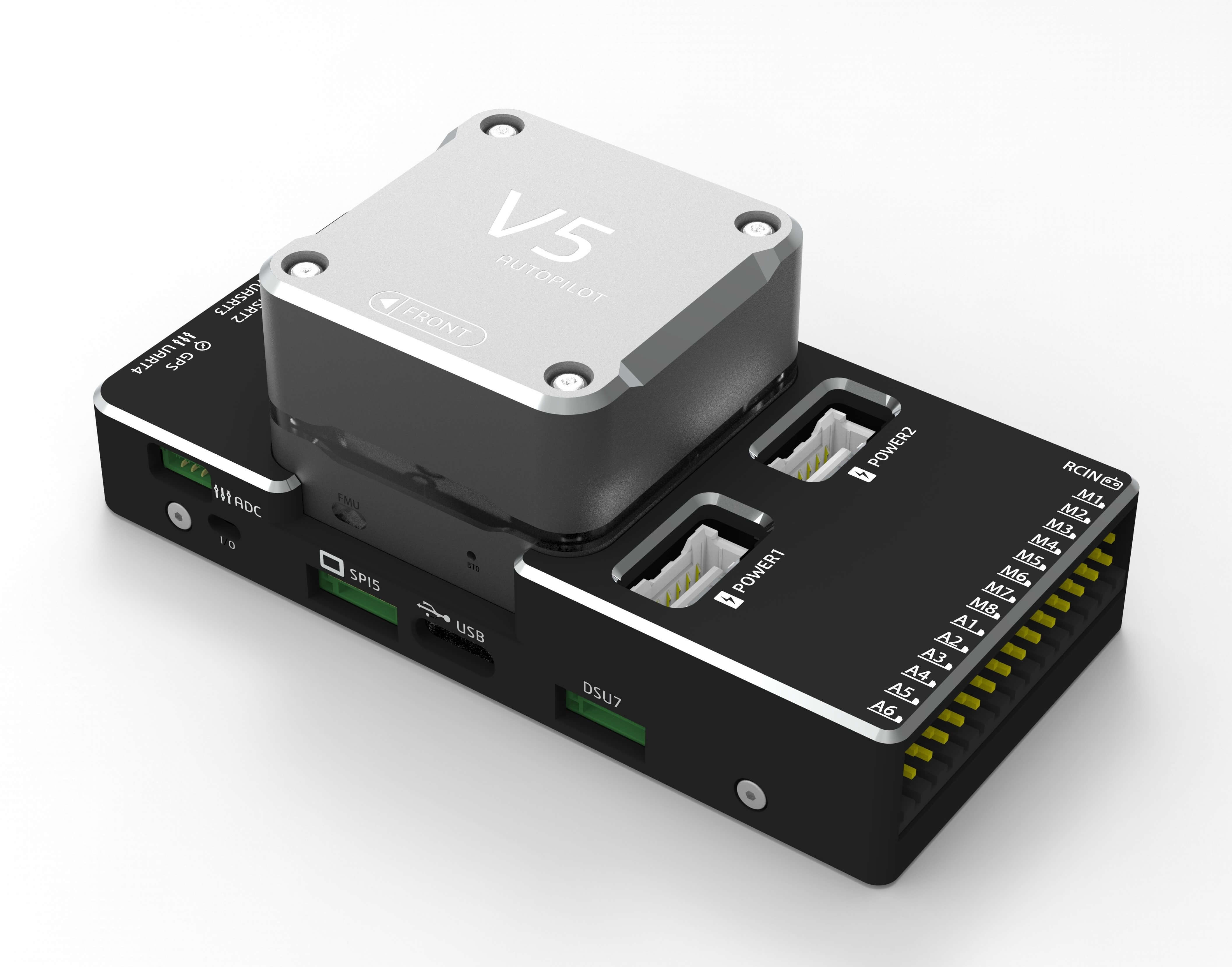
接口定义
如显示不清晰,请点击右键“另存为”下载到本地查看。
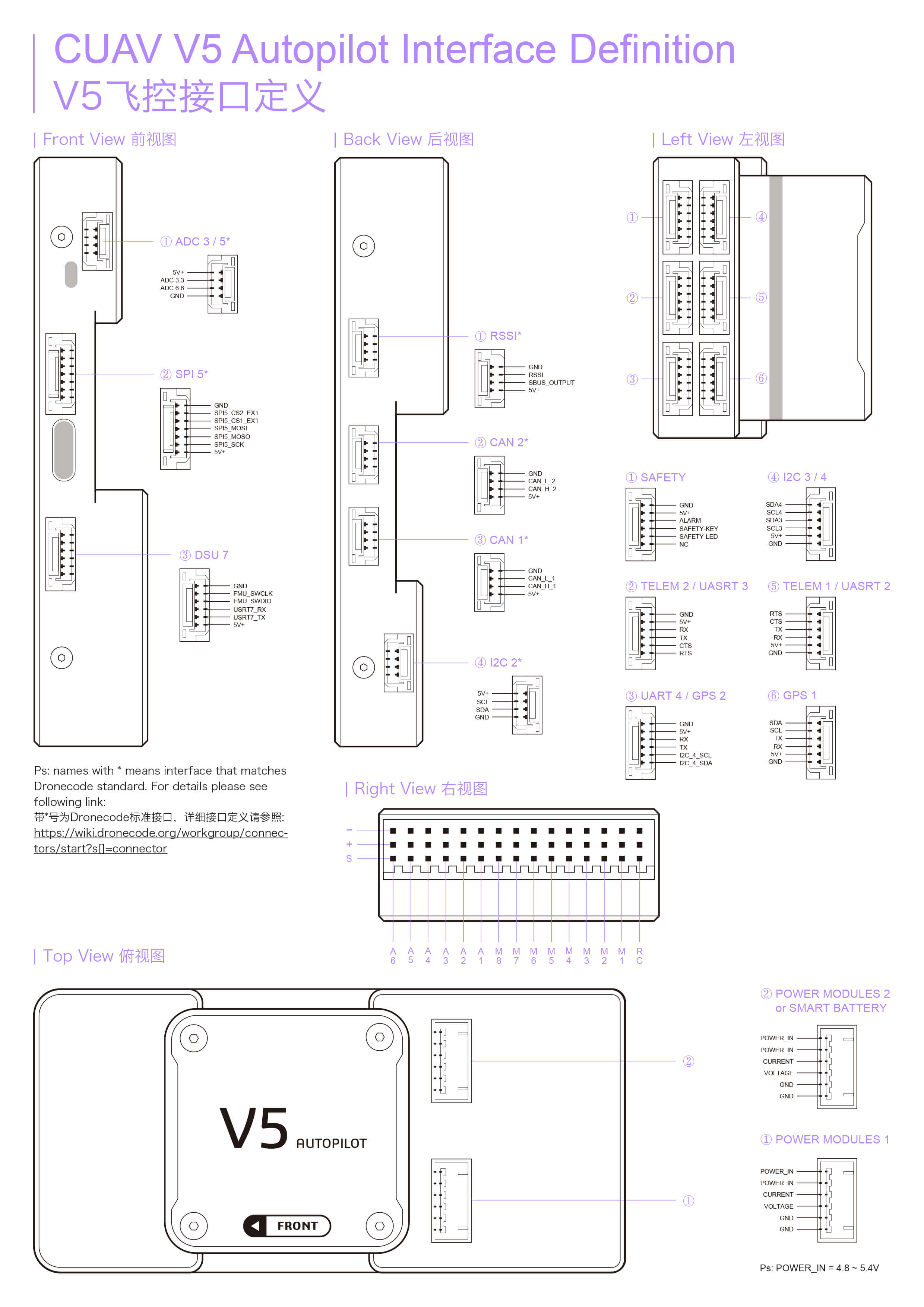
DUS 7为cuav全新命名的接口,其包含FMU SWD接口及UART7,其中当V5运行PX4固件时UART7作为DEBUG接口,当V5运行ArduPilot固件UART7作为通用串行口。RCIN接口只限于给遥控器供电,不可接入任何电源/负载.
PX4固件编译命令
make px4fmu-v5_default upload
ArduPilot固件编译命令
./waf configure --board CUAVv5
./waf copter --upload