User guide for PX4
Real-time motion (RTK) increases the accuracy of GNSS / GPS systems to the centimeter level. RTK makes PX4 can be used for precision measurement and other precision measurement.
Please prepare the following hardware devices and perform hardware connection before use.
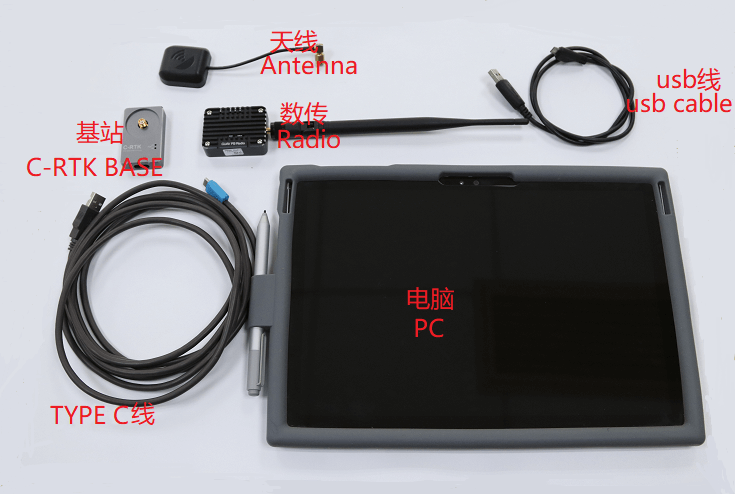
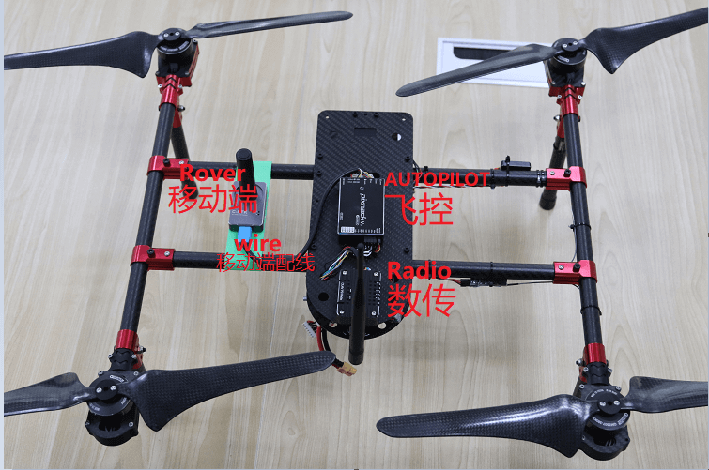
Data transmission
The aircraft must be connected to the ground station via data / communication links. The link must use the MAVLink2 protocol because it can use the channel more efficiently. This should be set by default, but if not, follow the MAVLink2 configuration instructions below.
C-RTK connection process
RTK GPS connection is essentially plug and play:
- Start QGroundControl and connect the C-RTK base station to the ground station via USB. The device is automatically identified.
- Start the vehicle and make sure it is connected to the QGroundControl.
The QGroundControl initiates the RTK setup process (called "entering a survey").
The entry survey is the start-up procedure to get an accurate estimate of the location of the base station. This process usually takes a few minutes (ending when the minimum time and accuracy specified in the RTK settings are reached). You can track progress by clicking the C-RTK GPS status icon.
Note: When the C-RTK GPS device is connected (except for the normal GPS status icon), the C-RTK GPS status icon will be displayed in the top icon bar. When RTK is set, the icon is red, and once the RTK GPS is in the survey complete state, the icon will turn white.
You can click the icon to see the current status and RTK accuracy.

Once the survey is completed:
The C-RTK GPS icon turns white and QGroundControl begins transmitting position data to the aircraft:

Aircraft GPS switched to RTK mode. The new mode is displayed in the normal GPS status icon (3D RTK GPS lock):

Optional PX4 configuration
The following settings may need to be changed (using QGroundControl
C-RTK GPS set up
C-RTK GPS Settings Specified in QGroundControl General Settings (SettingsView & gt; General Settings)
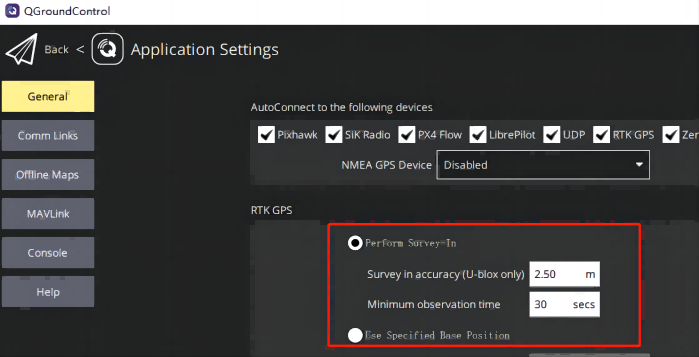
These settings define the minimum duration and minimum accuracy (referred to as "measurement input") to complete the C-RTK GPS setup process.
MAVLink2
The MAVLink2 protocol must be used because it can use lower bandwidth channels more efficiently. This should be enabled by default in recent builds.
To make sure MAVLink2 is used:
Update telemetry module firmware to the latest version(Please refer to QGroundControl>seting >firmware)。
Set MAV_PROTO_VER to 2(Please refer toQGroundControl seting >parameter)
debugging
You may also need to adjust some of the parameters, because the default parameters are adjusted in meters instead of centimeters. For example, you can reduce EKF2_GPS_V_NOISE and EKF2_GPS_P_NOISE to 0.2.