Set rtkbase in Missionplanner
If you use Ardupilot firmware to build an RTK differential system, you need to perform base station-side positioning configuration and data forwarding through the missionplanner. During the positioning configuration of the base station, there is no need to start the mobile station and drone.
- Open the Mission Planner
- Enter the initial settings
- Click on optional hardware
- Click on RTK/GPS Inject you will see the following page:
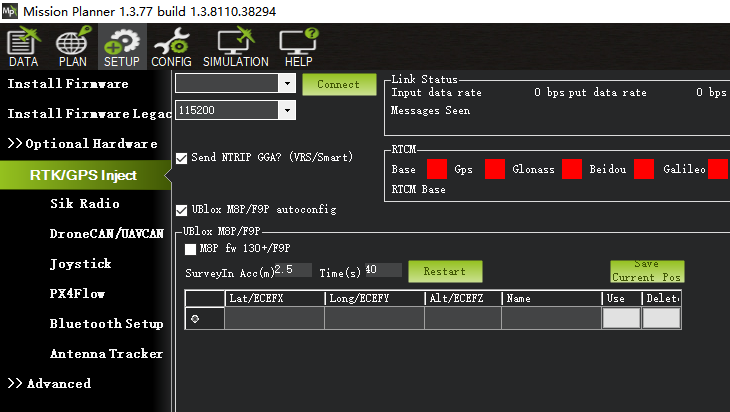
- Set the base station port in the upper left corner
- Click connect
- In the SurveyIn Acc section, enter the absolute geographic accuracy that you expect your C-RTK base station to achieve. In the Time field, enter the shortest search time you want.
- Click Restart (the ground station will transfer the data you input to the C-RTK base station, and the base station will start a new round of search star positioning)
- You will see the following page: During the search process, the current search star positioning will be displayed in the box on the right side of the Mission Planner page:
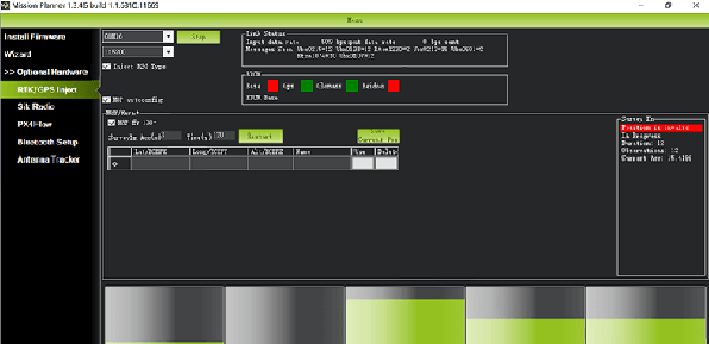
- Position is invalid: The base station has not yet reached a valid location;
- In Progress: Search Star is still in progress;
- Duration: The number of seconds the current search star has been executed;
- Observation: the number of observations obtained;
- Current Acc: The absolute geographic accuracy that the current base station can achieve.
- The green vertical bar below Mission Planner shows the satellite and satellite signal strengths currently searched by the base station. The base station requires a certain amount of convergence time to meet your desired accuracy requirements. After testing, in an unobstructed area, it takes a few minutes to reach an absolute accuracy of 2m, and an absolute accuracy of less than 30cm takes about one hour, and it takes several hours (under ideal conditions) to achieve an accuracy of less than 10cm.
[!NOTE] The absolute geographic accuracy of the base station here will affect the absolute geographic accuracy of the mobile station without affecting the relative accuracy of the base station and the mobile station. If your application does not require drones with high absolute geographic accuracy, you don't need to set the base station's accuracy too high, resulting in longer search times. Even if the accuracy of the base station is 1.5~2m, the positional accuracy of the mobile station relative to the base station can still reach the centimeter level.
After the base station search star is completed, the Mission Planner will display the following page:

Using NTRIP Network RTK Base Station
Missionplanner supports NTRIP protocol to access CORS network RTK base station service instead of RTK base.
Setup Tutorial:
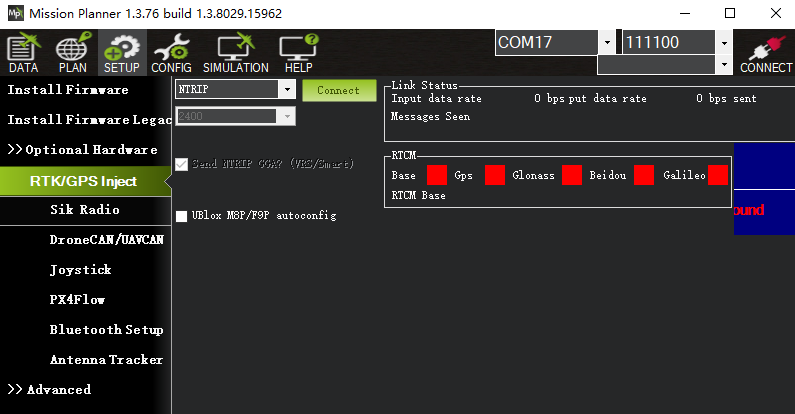
- Set to NTRIP in MP Ground Station>Initial Settings>Optional Hardware>RTK/GPS Inject
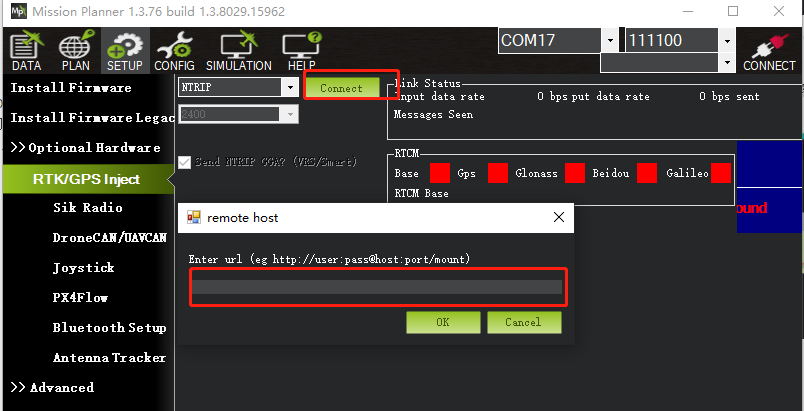
- Click "Connect" to enter the URL.
[!TIP] URL format:http://Account:password@host:port/RTCM32_GGB.
[!NOTE] Ardupilot uses the WGS84 coordinate system, and the CORS port number should be set to 8002; the MP ground station will save observation log files in the log storage folder during work, which can be used for PPK post-calculation.
RTK positioning status
Using the paired digital transmission module to connect to the same Mission Planner ground station, the data of the base station will be transmitted to the C-RTK mobile station on the drone through the data transmission module. On the main page of Mission Planner, you can see that the current GPS status of the drone is displayed as RTK Float/RTK Fixed/3D RTK, indicating that the UAV's positioning has entered the RTK state.
RTK Float is a floating point solution.
RTK Fixed is a fixed solution.
RTK Fixed has higher accuracy and is extremely environmentally demanding, and positioning can enter the RTK Fixed state when the signal is good enough。
