Upgrade firmware
This article mainly describes how to upgrade the firmware for C-RTK2 HP.
Preparations before upgrade
- Flight controller running ArduPilot firmware
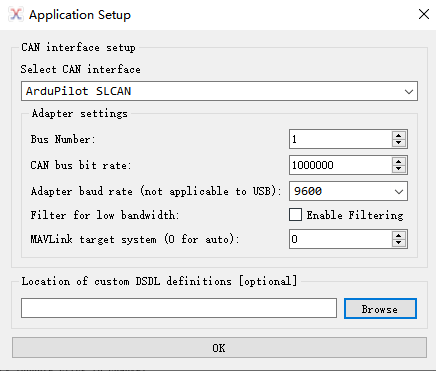
- Download Dronecan GUI/Mission Planner
- Connect C-RTK2 HP to flight controller
- Download firmware file
Set flight controller parameters
To upgrade the C-RTK2 HP firmware through the flight controller, you also need to set the following parameters in the Mission plannerd ground station"All parameter table:
For flight controllers using STMF7XX/STMH7XX as MCU:
"CAN_SLCAN_CPORT set to 2
'Serial7_Protocol set to 22
- Reboot
NOTE These flight controllers will have two usb driver ports in AP4.0/AP4.0 and above firmware, one is the flight controller mavlink output port, and the other is the slcan port; if there are no two ports, please uninstall the driver and reinstall)
For flight control using STM32F4xx as MCU
CAN_SLCAN_CPORT set to`1`
CAN_SLCAN_TIMEOUT set to 130000
CAN_SLCAN_SERNUM set to 0
Do not reboot until the upgrade is complete.
[!NOTE] STM32F4 does not support dual virtual USB ports, so the flight control of FMU v5 and below (not included) can only be used for SLCAN after turning off MAVlink transmission; after the above settings, USB will stop outputting mavlink data and change to SCLAN port; MAVlink will be restored after restarting transmission.
Load firmware
Upgrade using Droncan GUI
- Select the device port corresponding to slcan and click ok
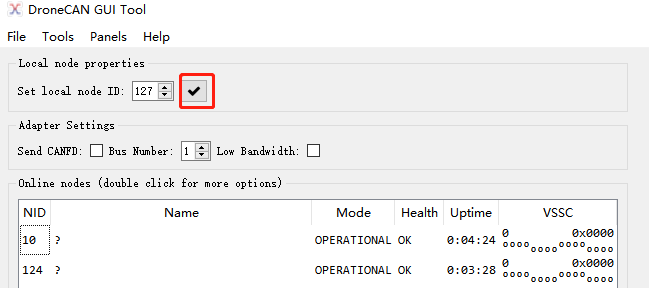
Click "√"; then double-click the device information
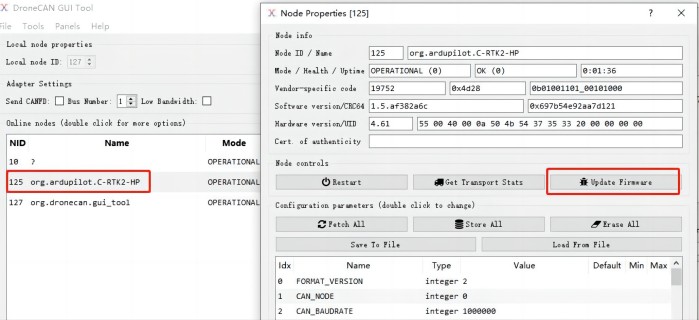
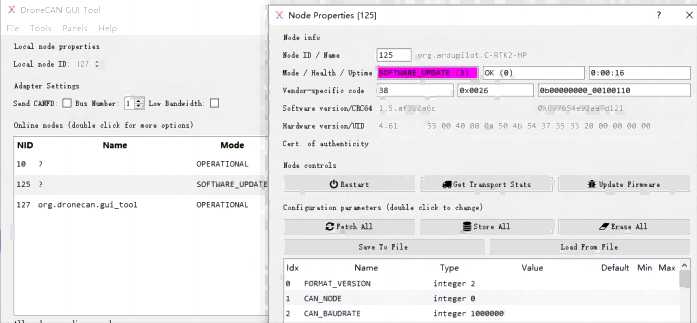
Click "update firmware", pop up a message box and click "yes"
- The mode/heakth/uptime item becomes "SOftware_update"
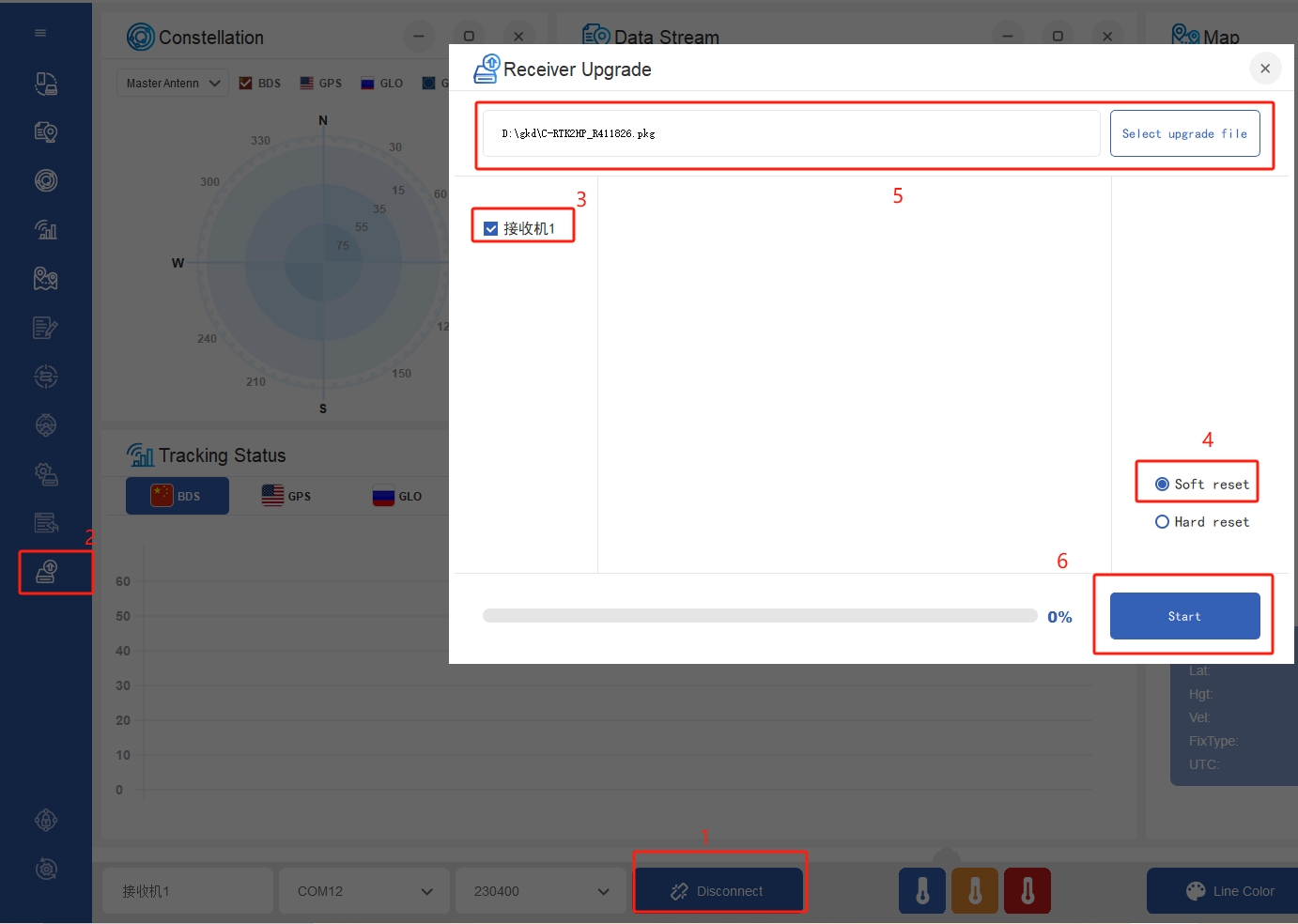
Upgrade GNSS system firmware
- Connect C-RTK2 HP to computer using USB cable
- Run Uprecise software and follow the steps below to upgrade the firmware.