双C-RTK 9Ps测向
功能概述
对于电力巡线、矿区巡查等等应用环境中,磁场环境复杂,经常会出现因磁场变化导致无人机航向数据错乱而坠毁;双C-RTK 9Ps支持GPS测向功能,为无人机飞行控制器提供航向数据,以代替磁罗盘。两个rtk模块可用于估算偏航,从而无需使用指南针,因为指南针可能会受到外界磁干扰或无人机的电机和电调的电磁干扰。
[!NOTE] 有些非CUAV飞行控制器的接口可能无法为两个C-RTK 9Ps提供充足的电源,建议为C-RTK 9ps提供5V(2A以上的电流)独立电源。
硬件准备
- C-RTK 9Ps移动端*2
- X7+飞控*1(也可用其它飞行控制器)
[!NOTE] C-RTK 9Ps需运行1.13及更高版本固件;飞行控制器需运行4.04及更高版本固件。
硬件连接
- 两个RTK模块各接一个天线,模块安装距离没有要求;
- 两个天线安装的水平距离相隔至少30厘米,距离越大方向精度越高;
- 第一个C-RTK 9Ps模块接X7+飞控GPS接口(UART3),第二个模块连接到7+飞控UART4接口。
软件参数配置
请在Mission planner->配置与调试->全部参数表
//启用GPS
SERIAL4_PROTOCOL = 5(“ GPS”)(如果连接到UART4)
GPS_TYPE = 17(“ 移动基准站模式”)
GPS_TYPE2 = 18(“ 移动基线流动站”)
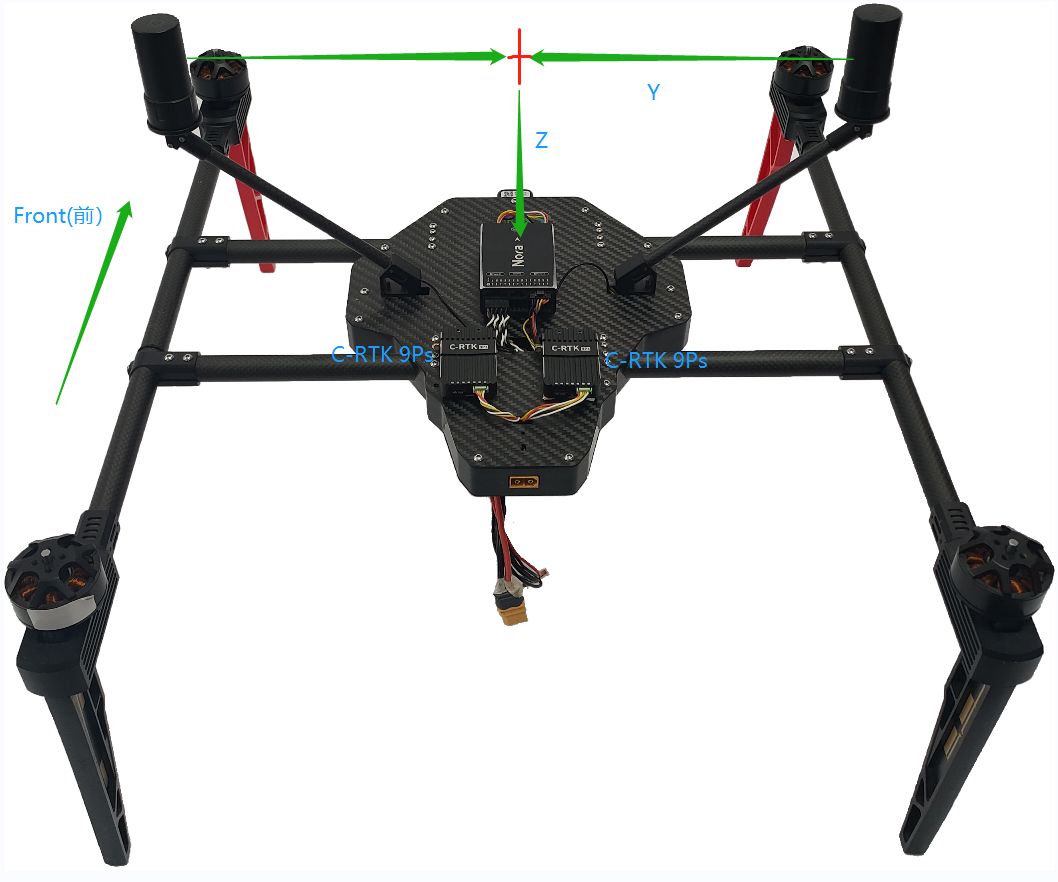
//设置GPS位置偏移量
- GPS_POS1_X=?(天线在重心前方为正,天线在重心后方为负)
- GPS_POS1_Y=?(天线在重心右侧为正,天线在重心左侧为负)
- GPS_POS1_Z=?(天线在重心上方为正,天线在重心下方为负)
- GPS_POS2_X=?(天线在重心前方为正,天线在重心后方为负)
- GPS_POS2_Y=?(天线在重心右侧为正,天线在重心左侧为负)
- GPS_POS2_Z=?(天线在重心前方为正,天线在重心后方为负)
- EK3_SRC1_YAW=2或32(“GPS”)或 3(当GPS航向不可用时,切换未磁罗盘)
//航向源设置
- EK3_MAG_CAL = 5(“使用外部偏航传感器”)/EK3_SRC1_YAW = 2(“GPS”)或 3(“当GPS航向不可用时,使用磁罗盘”)
测试验证
- 在空旷无遮挡的环境测试以保证良好的定位。
- 无人机上电,静置一段时间,直到地面站显示gps1定位状态为rtk fixed,gps2定位状态为3D定位,表示完成定位;然后检查地面站的航向和地磁方向是否匹配。旋转无人机,检查地面站的航向是否正确更新变化。
- 如果方向相反,则可能参数GPS位置偏移设置不正确。
- 所报告的两个RTK模块之间的距离与设置的两个天线之间的距离相差最好小于20%,差值越小方向精度越高;
- 所报告的两个RTK模块的高度与车辆的姿态相匹配,两个RTK模块的高度差值小于设置的两个天线的距离的20%。