C-RTK GPS
实时运动(RTK)将GNSS / GPS系统的精度提高到厘米级。 RTK使得PX4可用于精密测量等精密测量领域。
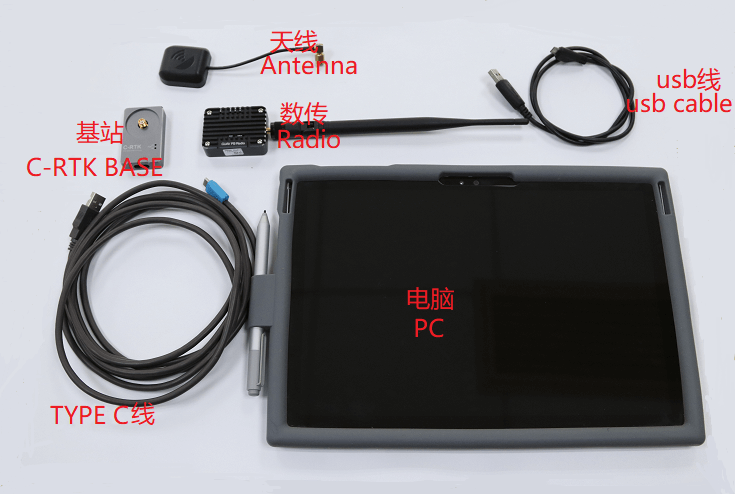
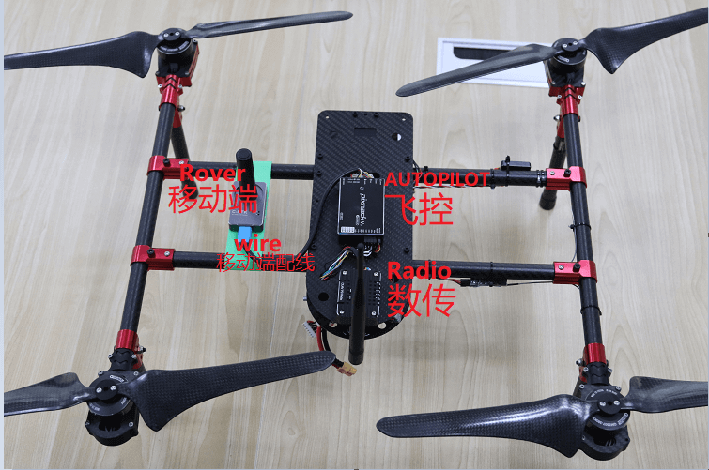
使用前请准备以下硬件设备并进行硬件连接:
C-RTK连接过程
RTK GPS连接本质上是即插即用的:
- 启动QGroundControl并通过USB将C-RTK基站端连接到地面站。该设备被自动识别。
- 启动车辆,并确保它连接到QGroundControl。
QGroundControl启动RTK设置过程(称为“进入勘测”)。
进入勘测是启动程序,以获得基站的准确位置估计。 该过程通常需要几分钟时间(达到RTK设置中指定的最小时间和精度后结束)。您可以通过单击C-RTK GPS状态图标来跟踪进度。
注:C-RTK GPS设备连接时(除了正常的GPS状态图标),顶部图标栏中将显示C-RTK GPS状态图标。 在设置RTK时,图标为红色,一旦RTK GPS处于勘测完成状态,图标将变为白色。
您可以点击图标查看当前状态和RTK精度。

一旦勘测完成:
C-RTK GPS图标变为白色,QGroundControl开始将位置数据传输到飞行器:

飞行器GPS切换到RTK模式。 新模式显示在正常的GPS状态图标(3D RTK GPS锁)中:

可选的PX4配置
以下设置可能需要更改(使用QGroundControl)。
C-RTK GPS设置
C-RTK GPS设置在QGroundControl常规设置(SettingsView>常规设置)中指定
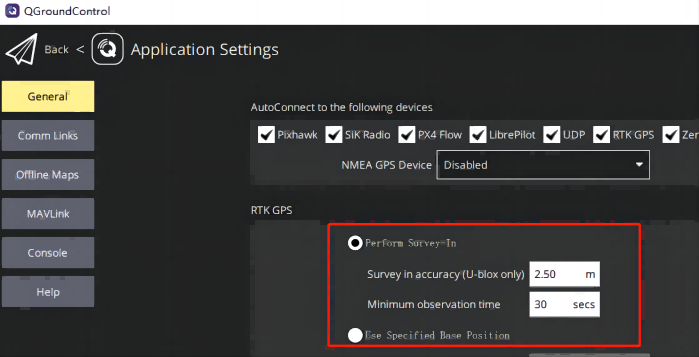
这些设置定义了完成C-RTK GPS设置过程的最小持续时间和最小精度(称为“测量输入”)。
MAVLink2
必须使用MAVLink2协议,因为它可以更有效地使用较低带宽的信道。 这应该在最近的构建中默认启用。
为了确保使用MAVLink2:
将遥测模块固件更新至最新版本(请参阅QGroundControl>设置>固件)。
将MAV_PROTO_VER设置为2(请参阅QGroundControl设置>参数)
调试
您可能还需要调整一些参数,因为默认参数是按照米而非厘米的精度调整的。 例如,您可以将EKF2_GPS_V_NOISE和EKF2_GPS_P_NOISE减少到0.2。