C-RTK3 G5使用指南
本章内容适用于将C-RTK3 G5使用于ArduPilot载具的场景。
[!NOTE] ArduPilot 4.4.0及以上版本支持C-RTK3 G5。
控制器参数设置(CAN连接,推荐)
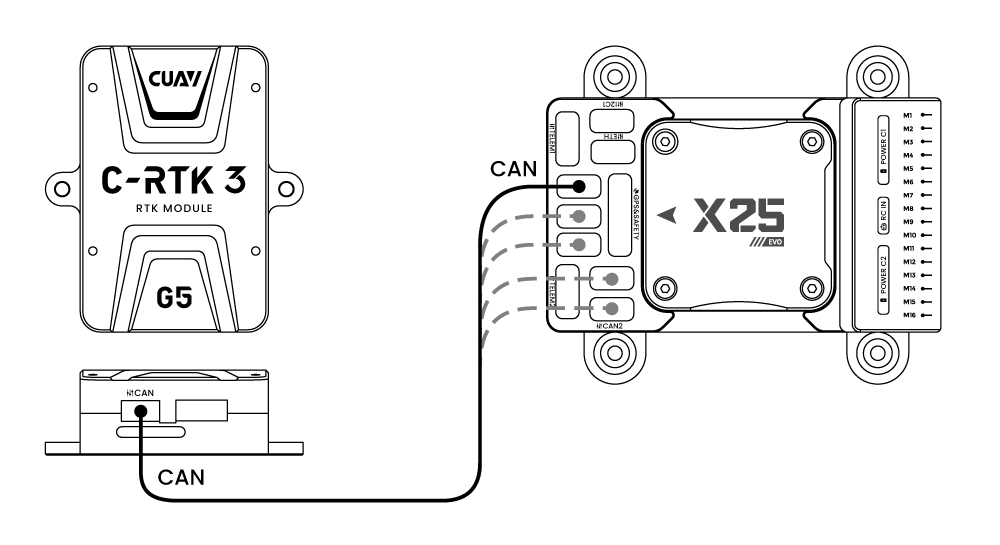
在配件包中取下CAN连接线,将控制器与C-RTK3的CAN接口相连;并安装好C-RTK3-G5的天线;确保两个天线距离20CM以上。
将智能控制器通过USB连接至地面站(比如MP/LGC地面站)
- 进入全部参数表界面在搜索栏输入参数名称并设置以下参数
//Mission planner在【配置/调参】→【全部参数表】→右侧搜索栏
| 参数名 | 值 | 注释 |
|---|---|---|
GPS1_TYPE |
9 | DroneCAN:9;UART:26 |
CAN_P1_DRIVER |
1 | CAN1驱动启用 |
GPS_AUTO_CONFIG |
2 | 自动配置DroneCAN GPS |
EK3_SRC1_YAW |
2 或 3 | 2:GPS;3:优先GPS,罗盘备份 |
GPS1_MB_TYPE |
1 | 主天线相对于从天线偏移配置 |
GPS1_MB_OFS_X |
数值(米);根据安装位置设置 | 主天线X轴偏移,安装于从天线前方为正 |
GPS1_MB_OFS_Y |
数值(米);根据安装位置设置 | 主天线Y轴偏移,安装于从天线右侧为正 |
GPS1_MB_OFS_Z |
数值(米);根据安装位置设置 | 主天线Z轴偏移,安装于从天线下方为正 |
GPS1_POS_X |
数值(米);根据安装位置设置 | 主天线相对重心X轴偏移,安装于重心前方为正 |
GPS1_POS_Y |
数值(米);根据安装位置设置 | 主天线相对重心Y轴偏移,安装于重心右侧为正 |
GPS1_POS_Z |
数值(米) ;根据安装位置设置 | 主天线相对重心Z轴偏移,低于重心为正 |
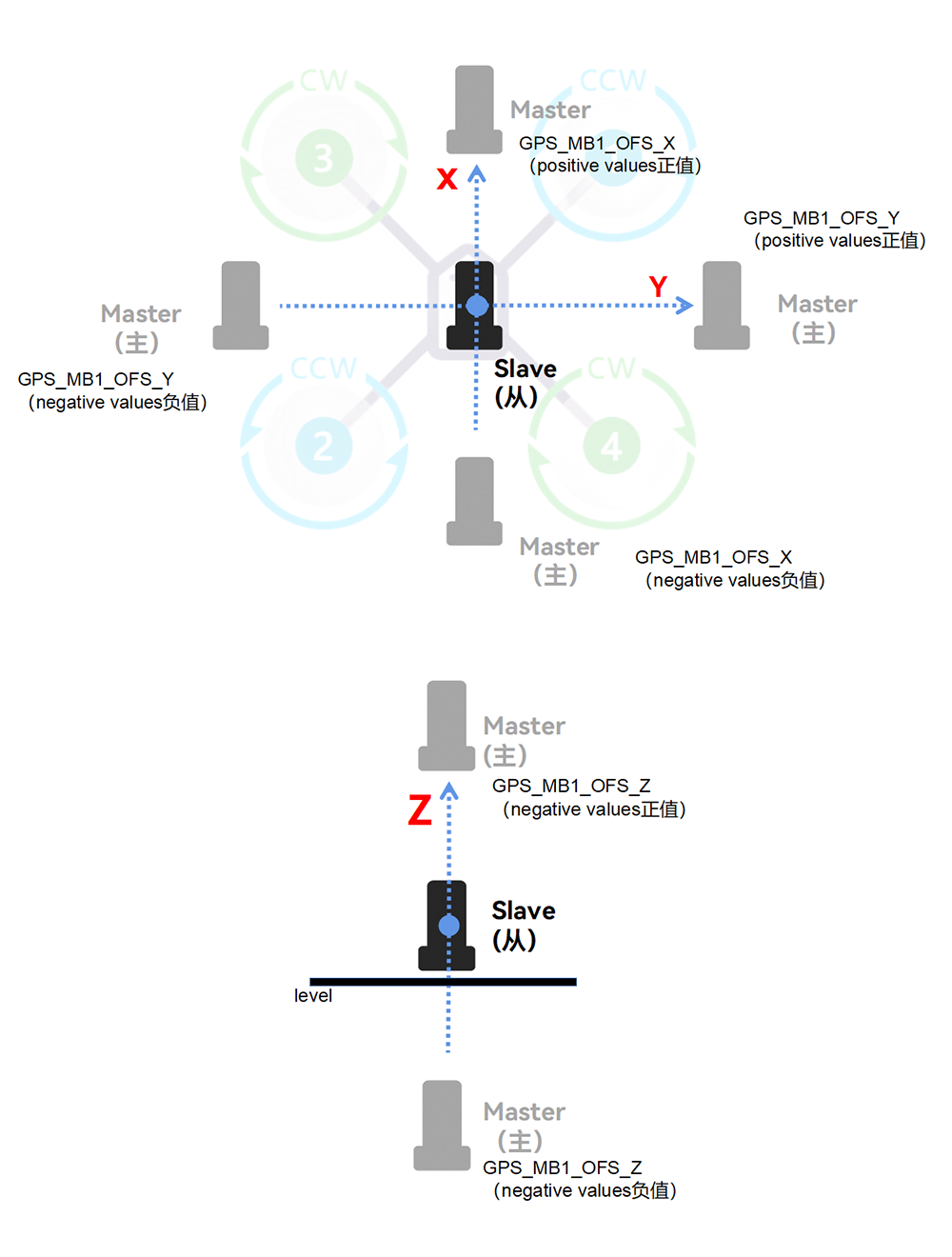
[!NOTE] 看不懂安装相对位置,请看后半部分关于天线偏移的图示;天线1(ANT1)为主天线,天线2为副天线。
对于AP 4.6(不含)以下版本固件:
| 参数名 | 值 | 注释 |
|---|---|---|
GPS_TYPE |
9 | DroneCAN:9;UART:26 |
CAN_P1_DRIVER |
1 | CAN1驱动启用 |
GPS_AUTO_CONFIG |
2 | 自动配置DroneCAN GPS |
EK3_SRC1_YAW |
2 或 3 | 2:GPS;3:优先GPS,罗盘备份 |
GPS_MB1_TYPE |
1 | 主天线相对于从天线偏移配置 |
GPS_MB1_OFS_X |
数值(米);根据安装位置设置 | 主天线X轴偏移,安装于从天线前方为正 |
GPS_MB1_OFS_Y |
数值(米);根据安装位置设置 | 主天线Y轴偏移,安装于从天线右侧为正 |
GPS_MB1_OFS_Z |
数值(米);根据安装位置设置 | 主天线Z轴偏移,安装于从天线下方为正 |
GPS_POS1_X |
数值(米);根据安装位置设置 | 主天线相对重心X轴偏移,安装于重心前方为正 |
GPS_POS1_Y |
数值(米);根据安装位置设置 | 主天线相对重心Y轴偏移,安装于重心右侧为正 |
GPS_POS1_Z |
数值(米) ;根据安装位置设置 | 主天线相对重心Z轴偏移,低于重心为正 |
主从天线偏移量图示
航向确认
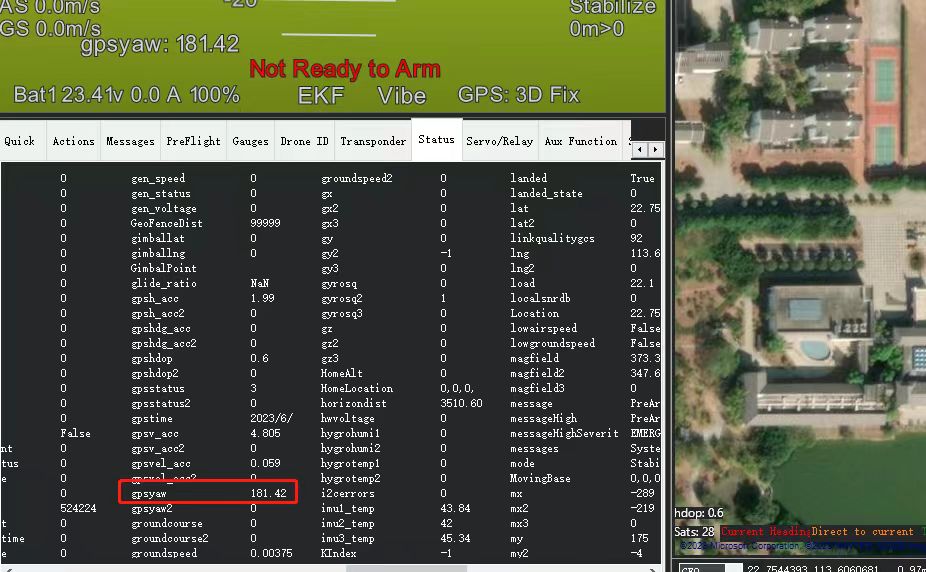
- GPS的航向信息在Mission Planner的飞行数据工具栏》状态栏中的gpsyaw。
- 检查gpsyaw值是否与真实航向一致。
- 转动机体,检查是否gpsyaw的值是否正确响应转动。
[!NOTE] 如果您无法知道真实方向,可以使用手机内置的指南针等作为参考(在没有磁场干扰的情况下,不要靠近电池)
常见问题
1、gpsyaw数值一直为0,则意味着控制器未获得航向数据,可能有以下情况。
- 未正确设置主从天线位置偏移量;设置误差不得高于20%。
- 当前定位质量过差,请放置在对天环境良好的户外环境。
- 从天线定位不好或者未定位,检查天线与馈线是否有良好的连接。
- 当前模块处于单天线模式,请检查参数。
2、GPS模式时,360°自旋飞行,飞行器无法保持位置画圈
- 先排查是否为罗盘问题,再检查以下
- GPS定位偏移量设置误差过大或未设置(GPS_POS1_X/Y/Z)
- 当前定位质量不良
- 关闭SBAS辅助定位,部分SBAS未覆盖/覆盖较差地区,开启SBAS会导致位置漂移。
使用UART连接控制器参数配置
[!NOTE] ArduPilot 4.4.0及以上版本支持C-RTK3 G5。
| 参数名 | 值 | 注释 |
|---|---|---|
GPS1_TYPE |
26 | DroneCAN:9;UART:26 |
GPS_AUTO_CONFIG |
1 | 自动配置串口GPS |
EK3_SRC1_YAW |
2 或 3 | 2:GPS;3:优先GPS,罗盘备份 |
GPS1_MB_TYPE |
1 | 主天线相对于从天线偏移配置 |
GPS1_MB_OFS_X |
数值(米);根据安装位置设置 | 主天线X轴偏移,安装于从天线前方为正 |
GPS1_MB_OFS_Y |
数值(米);根据安装位置设置 | 主天线Y轴偏移,安装于从天线右侧为正 |
GPS1_MB_OFS_Z |
数值(米);根据安装位置设置 | 主天线Z轴偏移,安装于从天线下方为正 |
GPS1_POS_X |
数值(米);根据安装位置设置 | 主天线相对重心X轴偏移,安装于重心前方为正 |
GPS1_POS_Y |
数值(米);根据安装位置设置 | 主天线相对重心Y轴偏移,安装于重心右侧为正 |
GPS1_POS_Z |
数值(米) ;根据安装位置设置 | 主天线相对重心Z轴偏移,低于重心为正 |
SERIAL3_PROTOCOL |
-1 | 如果GPS&Safety接口未接任何GPS,关闭串口3,GPS2/UART4将被认为GPS1接口 |
SERIAL4_PROTOCOL |
5 | 设置串口4为GPS接口,一般不需要修改 |
SERIAL4_BAUD |
460800 | 设置串口波特率为460800 |
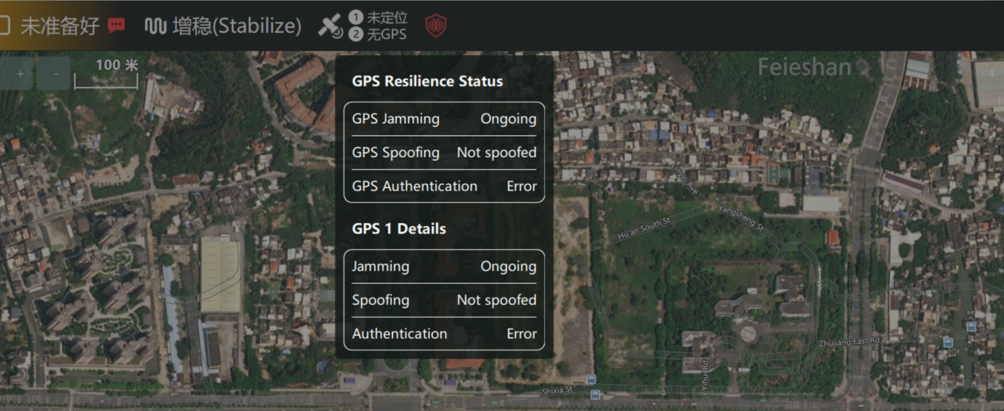
干扰信息显示
[!NOTE] C-RTK3 G5支持干扰状态显示,需要控制器固件和地面站支持;如有需要请联系CUAV技术。