C-RTK3 G5(PX4)配置指南
本章适用于将C-RTK3 G5用于PX4飞行栈(运行PX4固件的智能控制器)。
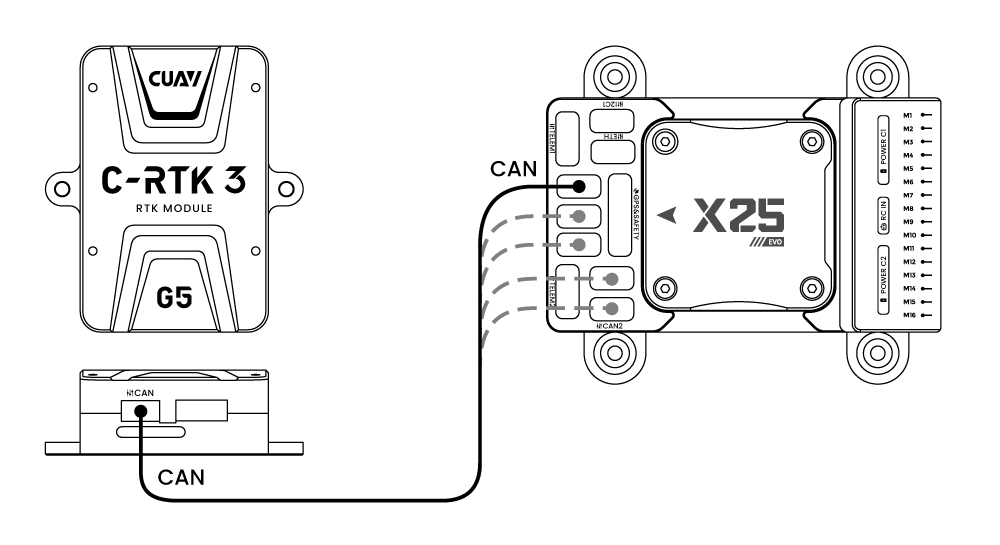
[!NOTE] C-RTK3 G5支持通过CAN(DroneCAN)和UART连接控制器,建议使用CAN;配置前请固定好两个天线并保持30cm以上的距离,请保持良好的对空环境,不要靠近窗边或者其它遮挡物,否则可能无法获得航向数据。
使用DroneCan
启用C-RTK3 G5
[!NOTE] 在QGC地面站》无人机设置》参数中设置以下参数后重启控制器。
| 参数名 | 值 | 注释 |
|---|---|---|
UAVCAN_ENABLE |
"Sensors Automatic Config" |
启用UAVCAN传感器自动配置 |
EKF2_GPS_CTRL |
15 |
使用双天线定向作为航向源 |
EKF2_GPS_POS_X |
(根据实际安装填写,单位:米) | 配置主天线离机子重心的距离,例:天线在重心前侧25cm处,EKF2_GPS_POS_X填0.25 |
EKF2_GPS_POS_Y |
(根据实际安装填写,单位:米) | 配置主天线离机子重心的距离,例:天线在重心右侧25cm处,EKF2_GPS_POS_Y填0.25 |
EKF2_GPS_POS_Z |
(根据实际安装填写,单位:米) | 配置主天线离机子重心的距离,例:天线在重心下侧25cm处,EKF2_GPS_POS_Z填0.25 |
UAVCAN_PUB_RTCM |
Enable / UAVCAN_PUB_MDB |
若使用RTK,订阅PX4飞控转发RTCM数据到基站 |
EKF2_GPS_YAW_OFF |
0 / 90 / 其他角度 |
航向偏移,角度按顺时针方向增加;主天线朝前填0,主天线在右、从天线在左填90 |
GPS_UBX_MODE |
Heading |
配置UBX GPS为定向(航向)模式 |
UAVCAN_SUB_GPS |
Enable |
启用UAVCAN GPS数据订阅 |
UAVCAN_SUB_GPS_R |
Enable |
启用UAVCAN备用GPS数据订阅 |
确认航向信息
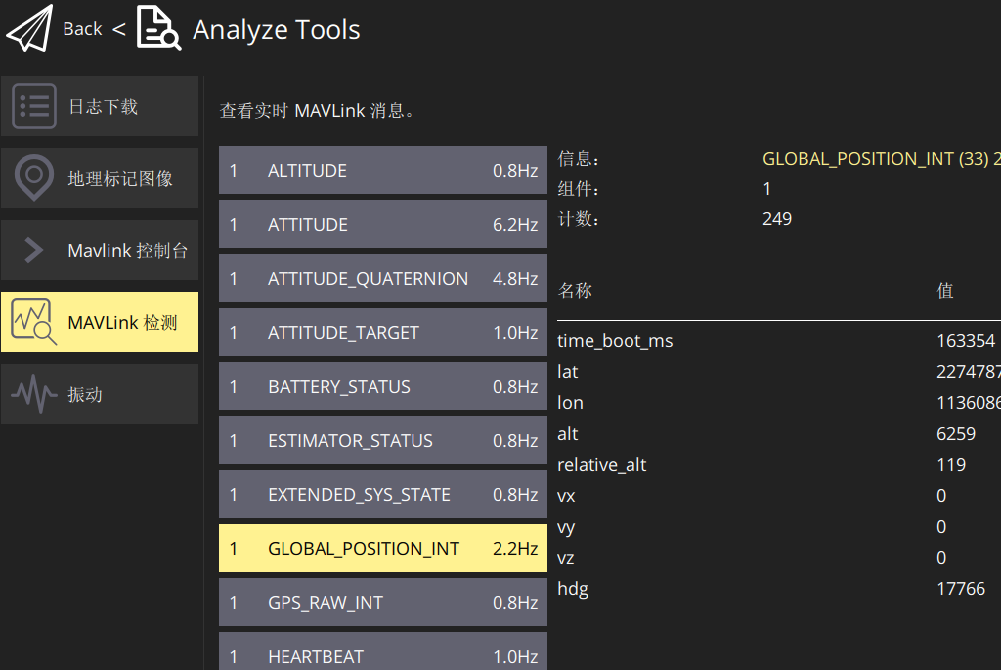
- 设置完成后,将载具放置在对空环境好的户外中,进行GPS搜星。当GPS定位完成可在QGC》mavlink检测界面观察GPS_RAW_INT的YAW值是否与飞机航向移一致,一致为设置正确,不一致请检查C-RTK2 HP的
GPS_YAW_OFFSET配置。
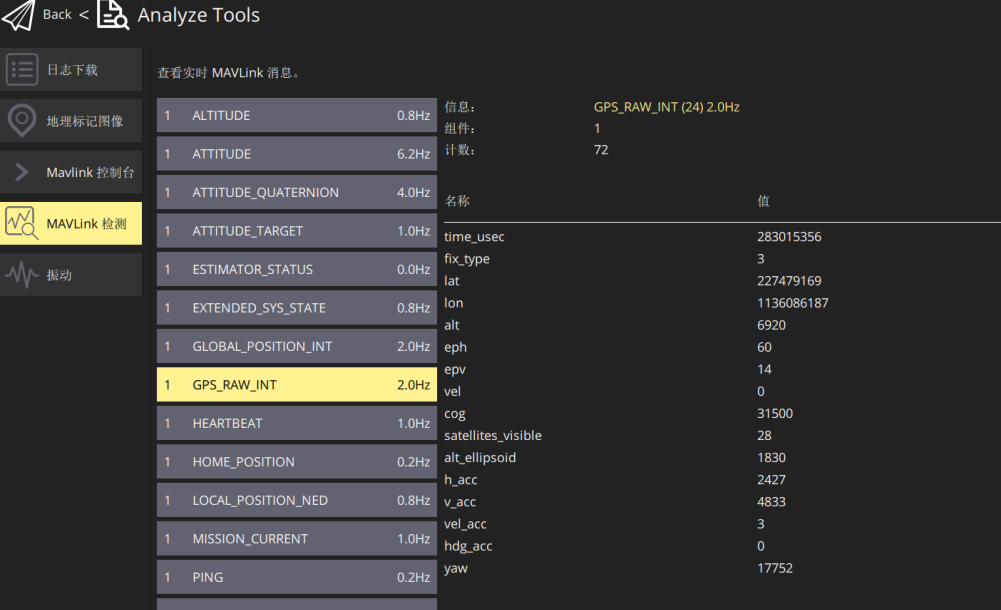
- GLOBAL_POSITION_INT的hdg数值和GPS_RAW_INT的yaw数值一致表示飞机航向用gps的方向数据