C-RTK3 G5厘米级定位定向模块
C-RTK3 G5 是 CUAV 推出的新一代厘米级定位定向模块;它集成 STM32H5 高性能处理器与 GNSS+ 技术套件,支持CAN FD总线;可轻松应对无线电干扰、电磁干扰、定位欺骗及高振动、高机动等复杂应用场景,有效拓展智能设备的应用边界,为其提供稳定、安全、精准的定位定向核心支撑。可广泛应用于车载导航、机器人、无人机车等需要卫星定位的设备。

产品特征
- 0.6cm+0.5ppm RTK定位精度
- 双天线定向免罗盘校准
- 多星多频定位定向模块
- STM32H5高性能处理器
- CAN FD+20Hz高刷新率
- 干扰探测与警报
- 全方位抗扰防骗
- 融合LOCK+,在高振动/冲击下仍稳定追踪
- 2路EVENT,可配置PPS输出
硬件参数
| C-RTK3 G5 | 参数规格 |
|---|---|
| 处理器 | STM32H5 Arm® Cortex®-M33 250 MHz |
| GNSS 硬件通道 | 789个 |
| 支持星座及频段 | GPS: L1C/A、L2C、L2PY、L5、L1C GLONASS: L1CA、L2CA、L2P、L3 CDMA 北斗: B1I、B1C、B2a、B2I、B3I、B2b Galileo: E1、E5a、E5b、E6 QZSS: L1C/A、L1 C/B、L2C、L5、L6 |
| 天线支持 | 双天线(可配置单/双天线工作模式) |
| 原始数据输出 | 支持 / TF卡记录 |
| 定位精度 | 单点定位:水平 1.2 m,高程 1.9 m 辅助定位:水平 0.4 m,高程 0.7 m RTK 定位:水平 0.6 cm + 0.5 ppm, 高程 1 cm + 1 ppm |
| 速度精度 | 3cm/s |
| 航向精度 | 天线间距 1 m 时:航向 0.15° 天线间距 5 m 时:航向 0.03° |
| 最大更新率 | 20 Hz |
| RTK 初始化时间 | 7 s(基线 < 40 km) |
| 时间精度相关 | PPS 分辨率:1.4 ns 事件精度:< 3ns; 冷启动时间:< 35s(无星历、无概略位置) 热启动时间:< 10 s(有星历、有概略位置) 重新捕获时间:1 s |
| 跟踪与捕获阈值 | 跟踪阈值:20 dB/Hz 捕获阈值:30 dB/Hz |
| 指南针 | RM3100 |
| 通讯协议 | DroneCan/SBF/NMEA-0183/RTCM |
| 通讯速率 | 1 Mbit/s(CAN) 8 Mbit/s(CAN FD) |
| 升级支持 | 是 |
| 运行固件 | C-RTK3 M4C |
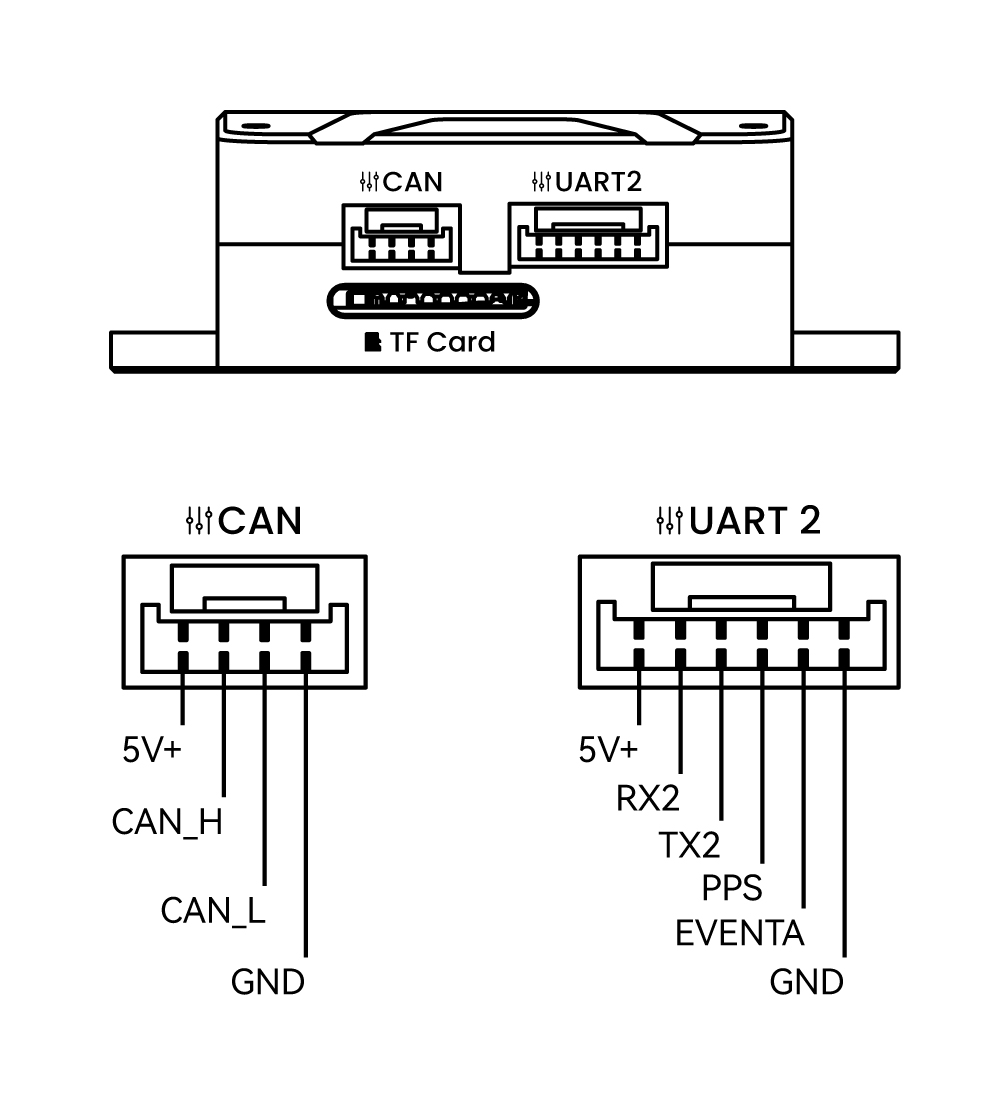
| 数据接口 | 1 x CAN(GH1.25 4P) 1 x UART(GH1.25 6P) 1 x USB(TYPE-C) 2 x 天线(BWMCX-KEF) 1 x TF卡槽 |
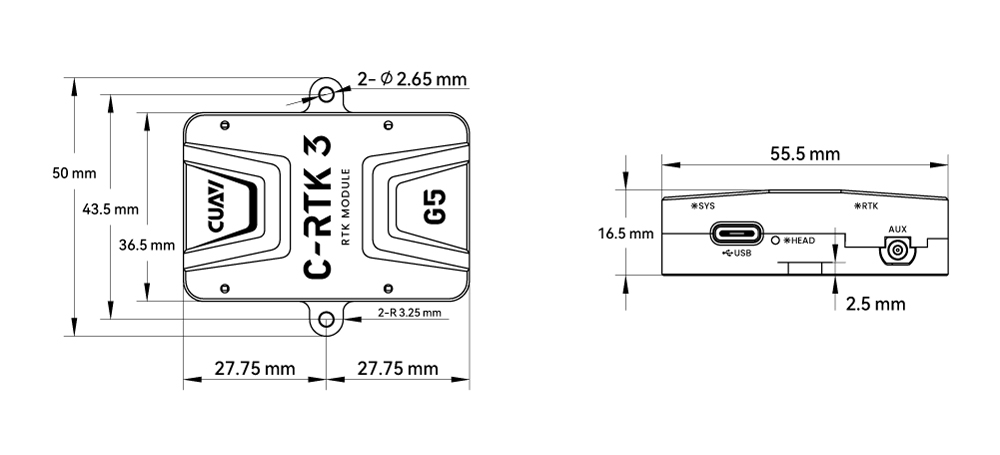
| 尺寸 | 55.5 × 50 × 16.5 mm (含螺丝孔) |
| 重量 | 43.5 g(不含天线和馈线) |
| 运行温度 | -10 ℃ ~ +80 ℃ |
| CRA-602天线 | 参数规格 |
|---|---|
| 覆盖角度 | 360° |
| 天线极化 | 右旋圆极化 |
| 天线LNA增益 | 38±2 |
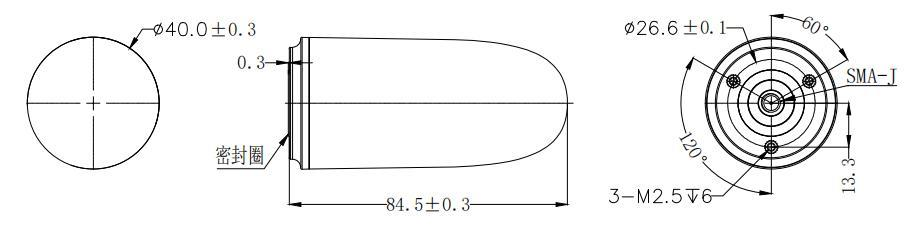
| 天线接头型号 | SMA-J |
| 天线尺寸 | Φ40*84.5 mm |
| 天线重量 | 36 g |
尺寸
C-RTK3 G5尺寸图
CRA-602天线尺寸图
采购
引脚定义
C-RTK3 G5系统参表
[!NOTE] 以下参数为C-RTK3 G5系统内部个性化设置参数;一般而言,不需要修改它们。
| 参数名 | 可选范围/选项 | 默认值 | 说明 |
|---|---|---|---|
| GPS_TYPE | — | — | 系统中固定配置,不适用 |
| GPS_MB_ONLY_PORT | — | — | 目前没用,仅为兼容 APM 自动配置 |
| CAN_NODE_ID | 0~125 | 0 | CAN 节点 ID;0=由控制器自动分配;节点ID冲突时,设为总线唯一非0值 |
| CAN_R | True/False | False | 是否启用 CAN 120Ω终端电阻;True=启用;多节点时建议启用 |
| GNSS_ITFM_SEND | — | — | 是否通过CAN发送干扰/欺骗检测数据 |
| FLASH_BOOTLOADER | True/False | False | 更新 Bootloader,完成自动回 False |
| CAN1_FD_BITRATE | 1–8(Mbps) | 4 | CAN1 的 CAN FD 数据段比特率 |
| CAN1_FD_EN_MODE | 0~2 | 2 | CAN FD 使能:0=禁用(经典CAN);1=强制使能CAN FD; 2=自动(根据总线负载与握手协议,系统自主选择) |
| GNSS_MODE | 0–65535(位掩码) | 109 | 卫星系统:Bit0=GPS、Bit1=SBAS、Bit2=Galileo、Bit3=BeiDou、 Bit4=IMES、Bit5=QZSS、Bit6=GLONASS、Bit7=NavIC |
| GNSS_EN_ATTITUDE | 0/1 | 1 | 0=单天线;1=双天线定向 |
| GNSS_DYN_MODEL | 0–13 | 10 | 动态模型:0=基准站、1=准静态、2=机器人、3=行人、4=乘用车、5=摩托车、 6=赛车、7=重型机械、8=海上、9/10/11=无人机、12=穿戴、13=无约束 |
| GNSS_RATE_MS | 50/100/200/500(ms) | 100 | GNSS输出周期:100ms=10Hz、50ms=20Hz |
| GNSS_UART2_BAUD | 1200~4000000 | 460800 | UART2波特率 |
| GNSS_UART2_PROT | 0–65535(位掩码) | 8 | UART2协议:Bit0=UBLOX、Bit1=NMEA、Bit2=RTCM、Bit3=SBF; 常用:2=NMEA、8=SBF、10=NMEA+SBF |
| SEP_ELE_MASK | -90~90(°) | 10 | 卫星截止高度角(当地水平面向上到卫星的夹角); 低于该角不参与PVT;建筑旁/山地等遮挡/干扰环境建议15~20° |
| SEP_SL | 0–200(秒) | 20 | 载波相位平滑伪距时长 |
| SEP_PPS_PRD | 0–21 | 15 | PPS输出周期: 0=关闭;1=10MHz;2=1MHz;3=100KHz;4=10KHz;5=5KHz;6=2KHz;7=1KHz;8=100Hz;9=50Hz;10=20Hz;11=10Hz;12=5Hz;13=4Hz;14=2Hz;15=1Hz;16=2S;17=4S;18=5S;19=10S;20=30S;21=60S |
| SEP_PPS_DUTY | 1–99(%) | 5 | PPS占空比(方波最大宽度为1000ms) |
| SEP_PPS_POL | 0/1 | 0 | PPS极性:0=低→高;1=高→低 |