C-RTK2 HP (PX4)配置指南
本章适用于将C-RTK 2HP用于PX4飞行栈(运行PX4固件的智能控制器)。
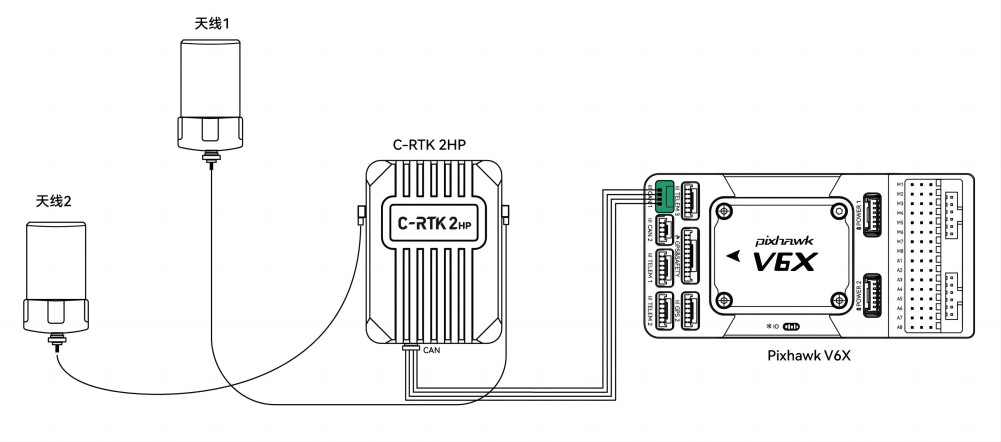
[!NOTE] C-RTK 2HP支持通过CAN(DroneCAN)和UART连接控制器,建议使用CAN;配置前请固定好两个天线并保持30cm以上的距离,请保持良好的对空环境,不要靠近窗边或者其它遮挡物,否则可能无法获得航向数据。
使用DroneCan
启用C-RTK 2HP
UAVCAN_ENABLE="Sensors Automatic Config"EKF2_GPS_CTRL=15 (使用双天线定向作为航向源) (如果主天线在前方,则将航向偏移设置为0。角度按时钟方向增加,如果主天线在车辆右侧,从天线在左侧,则将偏移设置为90度)EKF2_GPS_POS_X,Y/Z(配置主天线离机子重心的距离,如果天线固定在无人机重心右侧25cm处,则配置EKF2_GPS_POS_Y为0.25)UAVCAN_PUB_RTCM=Enable或UAVCAN_PUB_MDB(如果使用RTK,订阅PX4飞控转发RTCM数据到基站)
[!NOTE] 天线1(ANT1)为主天线,天线2为副天线。
配置C-RTK2 HP
如果主天线不是在从天线正前方安装,需要对C-RTK 2HP进行天线安装方向配置。
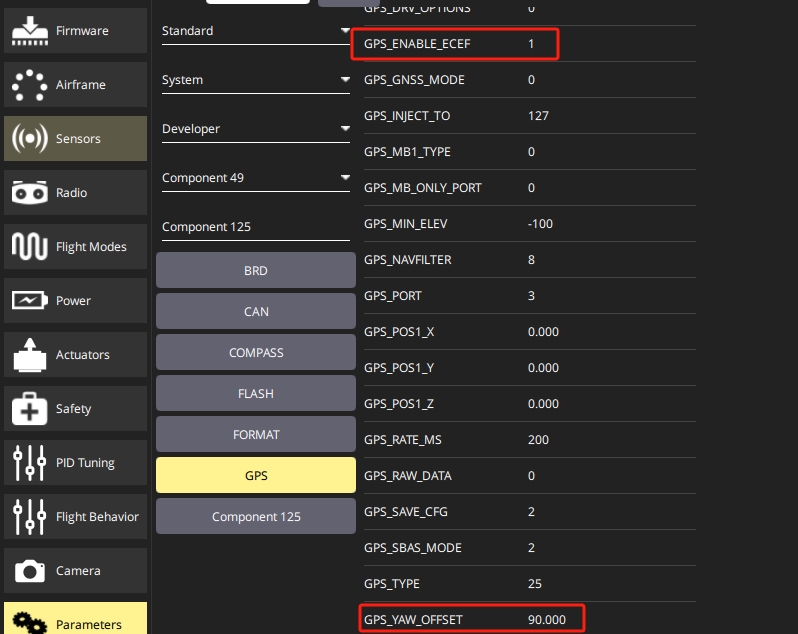
- QGC地面站》Parameters(参数表)》Component X(X为节点ID)》GPS
- 根据主天线和从天线的相对安装方向设置
GPS_YAW_OFFSET(C-RTK 2HP参数,不是控制器的参数,如果主天线在前方,则将航向偏移设置为0。角度按时钟方向增加,如果主天线在车辆右侧,从天线在左侧,则将偏移设置为90度)。 - 设置
GPS_ENABLE_ECEF=1(C-RTK 2HP参数) - 搜索
EKF2_MAG_TYPE并将其设置为None(控制器参数,关闭磁罗盘)
[!TIP] 请勿错误的设置智能控制器
GPS_YAW_OFFSET参数,它对C-RTK 2HP的航向数据无效;
确认航向信息
- 设置完成后,将载具放置在对空环境好的户外中,进行GPS搜星。当GPS定位完成可在QGC》mavlink检测界面观察GPS_RAW_INT的YAW值是否与飞机航向移一致,一致为设置正确,不一致请检查C-RTK2 HP的
GPS_YAW_OFFSET配置。
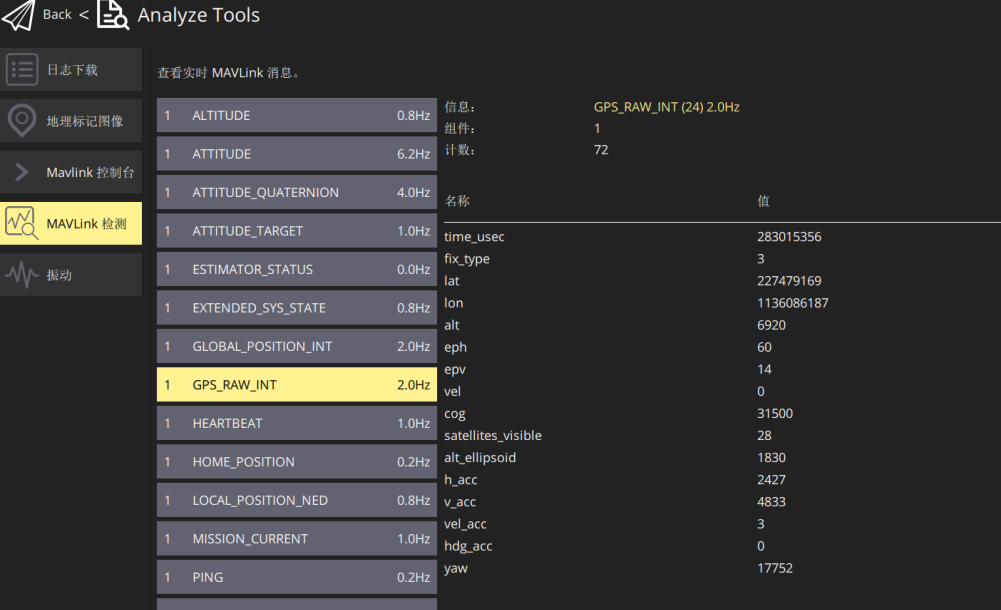
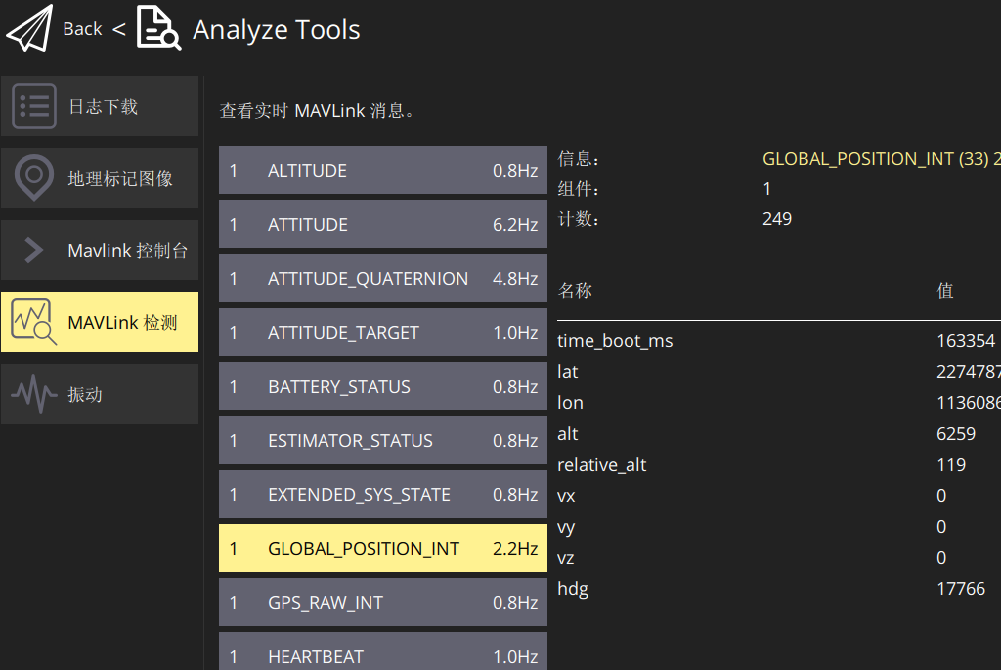
- GLOBAL_POSITION_INT的hdg数值和GPS_RAW_INT的yaw数值一致表示飞机航向用gps的方向数据
[!TIP] 如果C-RTK 2HP定位成功后依然无法航向数据并且QGC CANNODE参数表中没有
GPS_YAW_OFFSET/GPS_ENABLE_ECEF参数,请升级C-RTK 2HP固件。
固件升级
PX4可以通过DroneCAN升级设备固件。飞控和模块通过CAN通信并正常识别到,将新固件二进制文件(.BIN后缀)复制到飞控的SD卡根目录中,然后重新启动。启动后,飞控将自动将固件传输到模块上并进行升级。如果升级成功,可以看到SD卡中的固件文件被自动删除,ufw目录中生成一个名为XX.bin的文件。
RTK
RTK系统由QGroundControl和自动驾驶仪将RTK基站的RTCM3数据转发到C-RTK 2HP并由其解算。
具体设置方法在这里.
[!NOTE] 我们建议使用C-RTK 9ps作为RTK基站而不是C-RTK 2HP,因为它作为RTK基站需要大量的设置工作。
方法二: C-RTK 2 HP通过UART连接控制器
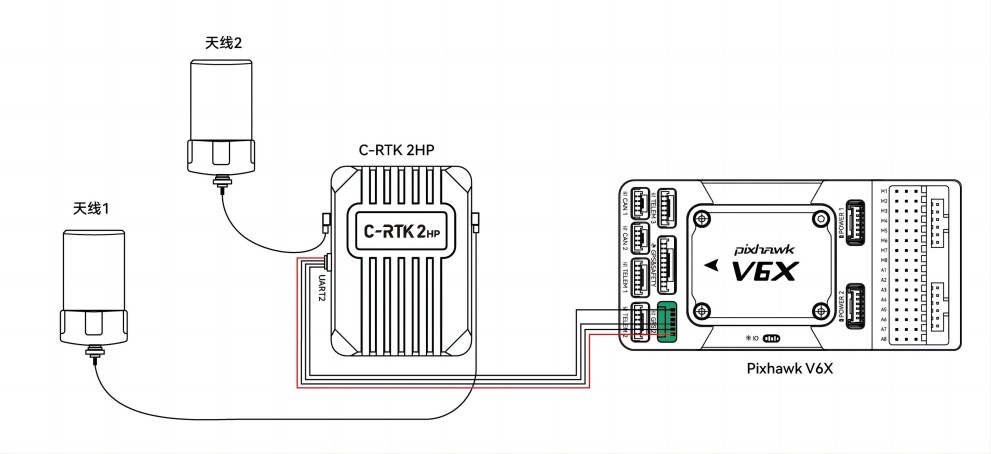
C-RTK 2HP配置
飞行控制器运行PX4固件,需安装UPrecise进行C-RTK2 HP参数配置。
- 通过USB将C-RTK2 HP连接到电脑,在UPrecise命令输入框

中输入以下指令,并按下键盘上的“Enter”键,发送指令
CONFIG COM2 230400 8 n 1
GPGGA 0.2
CONFIG HEADING FIXLENGTH
CONFIG UNDULATION AUTO
CONFIG
UNIHEADINGA 0.200
AGRICA 0.200
MODE MOVINGBASE
GNGGA 0.200
GNRMC 0.200
VERSIONA
SAVECONFIG
PX4参数配置
Ser_gps1_baud=230400Gps_1_protocol=6:nmeaEKF2_GPS_CTRL=15(使用双天线定向作为航向源)GPS_YAW_OFFSET(如果主天线在前方,则将航向偏移设置为0。角度按时钟方向增加,如果主天线在车辆右侧,从天线在左侧,则将偏移设置为90度)EKF2_GPS_POS_X,Y/Z(配置主天线离机子重心的距离,如果天线固定在无人机重心右侧25cm处,则配置EKF2_GPS_POS_Y为0.25)