C-RTK2 HP使用指南
本章适用于将C-RTK 2HP用于ArduPilot控制器(运行Ardupilot固件的控制器)。
[!NOTE]
C-RTK 2HP支持通过CAN(DroneCAN)和UART连接控制器,建议使用CAN;配置前请固定好两个天线并保持30cm以上的距离,请保持良好的对空环境,不要靠近窗边或者其它遮挡物,否则可能无法获得航向数据。
硬件连接
C-RTK2 HP支持以下方式连接(二选一):
CAN(推荐)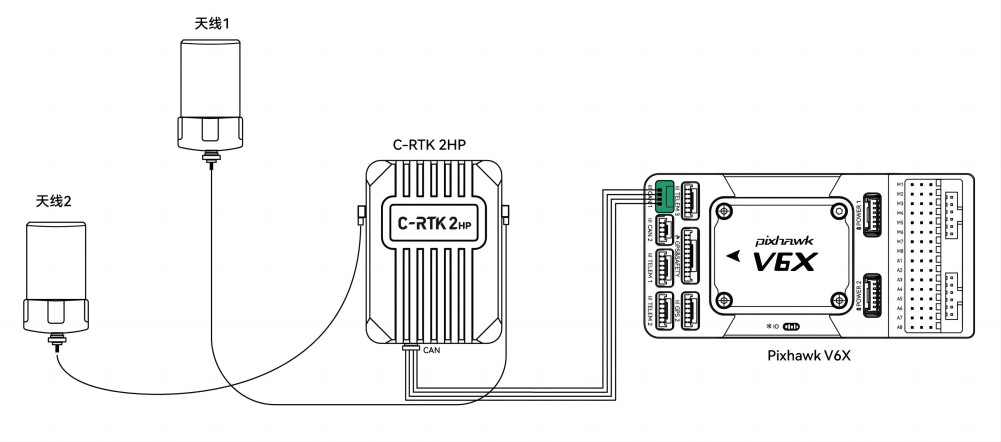
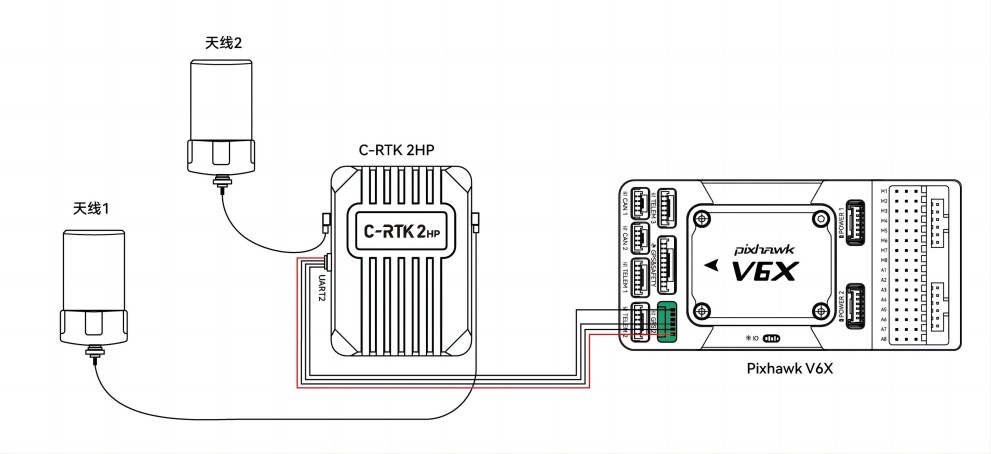
UART
启用C-RTK2 HP
在Missionplanner/配置调参/全部参数表中设置以下参数:
- GPS_TYPE = 9(droncan:9;UART:25)或 GPS1_TYPE = 9(AP4.6以上版本固件)
- CAN_P1_DRIVER=1(CAN1驱动)
- GPS_AUTO_CONFIG=2(自动配置Dronecan GPS)
- EK3_SRC1_YAW = 2(GPS)或3(优先使用GPS,罗盘作备份)
[!TIP]
当控制器使用EKF3作为姿态和位置估计源时(AHRS_EKF_TYPE=3;EK3_ENABLE=1),航向数据才能生效;ardupilot默认使用EKF3,如果您是将他人文件直接导入参数进行设置,请核对该参数;否则无法获得航向数据。
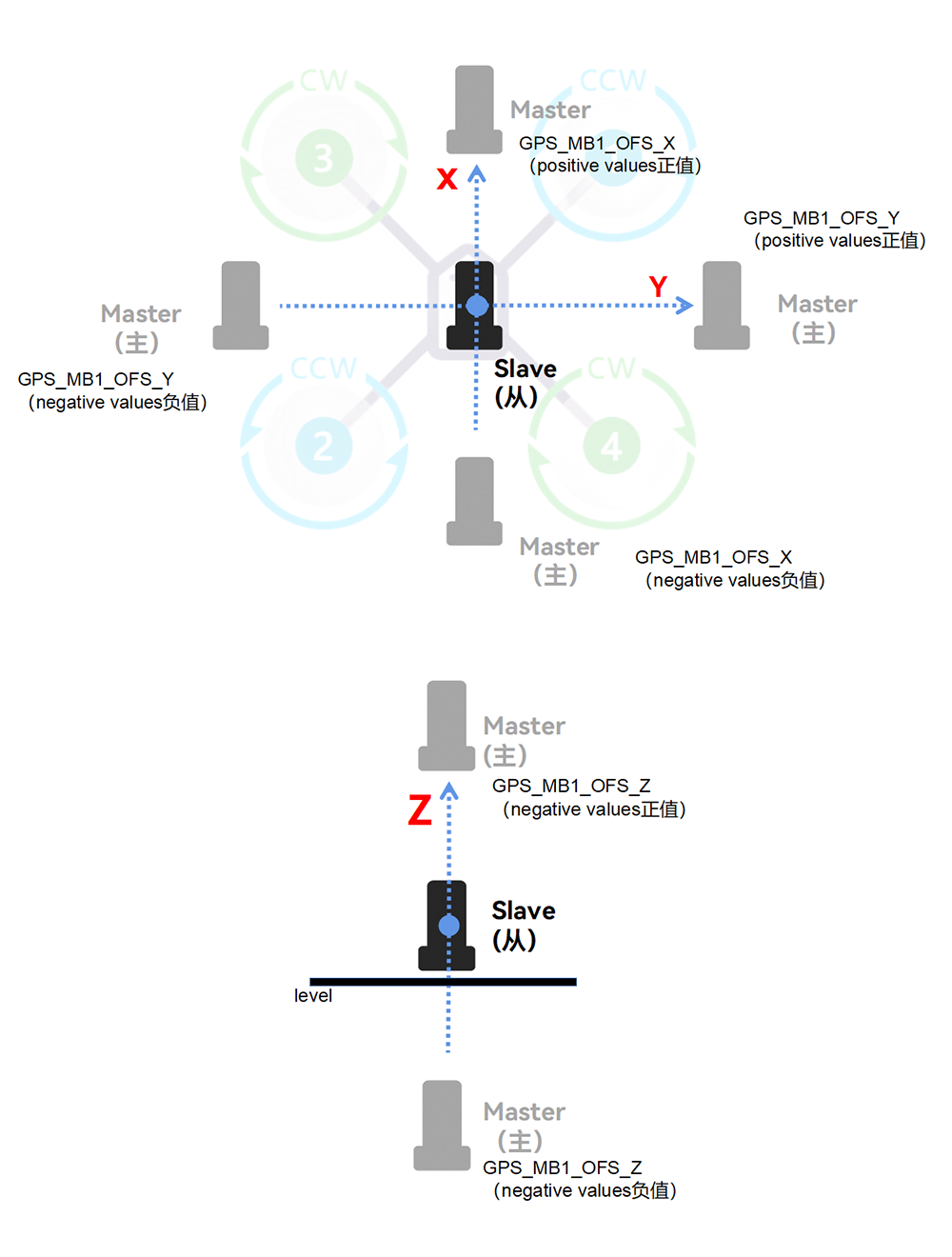
主从天线偏移
- GPS_MB1_TYPE=1(GPS1移动基线主天线相对于从天线的偏移量,修改后刷新参数可以显示下一个参数)
- GPS_MB1_OFS_X:主天线相对于从天线的X轴偏移量(距离,以米为单位),如果主天线在从天线的前面为正值。
- GPS_MB1_OFS_Y:主天线相对于从天线的Y轴偏移量(距离,以米为单位),如果主天线在从天线的右侧为正值。
- GPS_MB1_OFS_Z:主天线相对于从天线的Z轴偏移量(距离,以米为单位),如果主天线低于从天线,则为正偏移量。
对于AP4.6及以上版本固件
- GPS1_MB_TYPE=1(GPS1移动基线主天线相对于从天线的偏移量,修改后刷新参数可以显示下一个参数)
- GPS1_MB_OFS_X:主天线相对于从天线的X轴偏移量(距离,以米为单位),如果主天线在从天线的前面为正值。
- GPS1_MB_OFS_Y:主天线相对于从天线的Y轴偏移量(距离,以米为单位),如果主天线在从天线的右侧为正值。
- GPS1_MB_OFS_Z:主天线相对于从天线的Z轴偏移量(距离,以米为单位),如果主天线低于从天线,则为正偏移量。
[!NOTE]
天线1(ANT1)为主天线,天线2为副天线。
GPS定位偏移
C-RTK2 HP以主天线(ANT1)位置为准,如果无法将其安装于无人系统的重心位置;您需要设置其与重心位置的偏移值,以作纠正。
[!NOTE]
未设置偏移量或错误的偏移设置,将会导致无人机设备获得错误的定位信息,会导致无人机航向偏转时发生位置偏移或者定位不准确.
GPS_POS1_X:主天线相对于重心的X轴偏移量(距离,以米为单位),如果主天线在重心的前面为正值。
GPS_POS1_Y:主天线相对于重心的Y轴偏移量(距离,以米为单位),如果主天线在重心的右侧为正值。
GPS_POS1_Z:主天线相对于重心的Z轴偏移量(距离,以米为单位),如果主天线低于重心位置为正值。
对于AP4.6及以上版本固件
GPS1_POS_X:主天线相对于重心的X轴偏移量(距离,以米为单位),如果主天线在重心的前面为正值。
GPS1_POS_Y:主天线相对于重心的Y轴偏移量(距离,以米为单位),如果主天线在重心的右侧为正值。
GPS1_POS_Z:主天线相对于重心的Z轴偏移量(距离,以米为单位),如果主天线低于重心位置为正值。
案例
以下图安装为例(AP4.6以下固件):

主天线位于重心及从天线的正右侧,高于重心2cm。
启用C-RTK2 HP
- GPS_TYPE=9(droncan)
- CAN_P1_DRIVER=1(如果连接CAN1接口)
- GPS_AUTO_CONFIG=2
- EK3_SRC1_YAW =3
- GPS_MB1_TYPE=1
天线偏移设置
- GPS_MB1_OFF_X=0
- GPS_MB1_OFF_Y=0.58
- GPS_MB1_OFS_Z=0
GPS定位偏移设置
- GPS_POS1_X=0.00
- GPS_POS1_Y=0.29
- GPS_POS1_Z=-0.02
航向确认
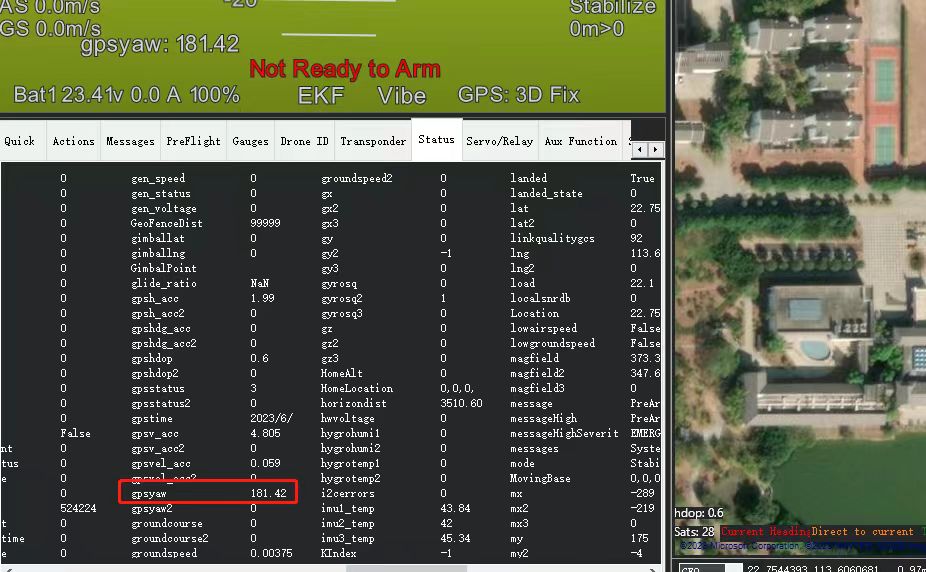
- GPS的航向信息在Missin planner的飞行数据工具栏》状态栏中的gpsyaw。
- 检查gpsyaw值是否与真实航向一致。
- 转动机体,检查是否gpsyaw的值是否正确响应转动。
[!NOTE]
如果您无法知道真实方向,可以使用手机内置的指南针等作为参考(在没有磁场干扰的情况下,不要靠近电池)
内置磁罗盘的作用
C-RTK2 HP内置RM3100磁罗盘,可作为安全冗余使用(当EK3_SRC1_YAW =3),需要使用时需进行罗盘校准操作,安装方向应于飞机方向一致。

[!NOTE]
当不使用磁罗盘时不需要进行罗盘校准,可以以任何方向安装。
RTK高精度定位
C-RTK2 HP可搭配C-RTK 9ps基站端或Ntrip(CORS)网络RTK基准站实现RTK厘米级高精度定位,基站配置: