升级固件
本文主要描述如何为C-RTK2 HP升级固件。
升级前准备
- 运行ArduPilot固件的飞行控制器
- 下载 Dronecan GUI/Mission Planner
- 将C-RTK2 HP连接到控制器
- 联系CUAV技术人员获取固件包
设置飞控参数
通过飞行控制器升级C-RTK2 HP固件还需在Mission plannerd地面站》全部参数表中设置以下参数:
对于使用STMF7XX/STMH7XX作为CPU的飞行控制器:
- CAN_SLCAN_CPORT设置为1
- Serial7_Protocol设置为22
- 重启飞控
[!NOTE] 这些飞控在AP4.0/AP4.0固件会有两个usb驱动端口,一个是飞控mavlink输出端口,一个是slcan端口;如果没有两个端口请卸载驱动重新安装)
对于使用STM32F4xx作为CPU的飞行控制
CAN_SLCAN_CPORT设置为1
CAN_SLCAN_TIMEOUT设置为130000
CAN_SLCAN_SERNUM设置为0
在升级完成前请不要重启
[!NOTE] STM32F4不支持双虚拟USB端口,所以FMU v5以下(不含)版本飞控只能通过关闭MAVlink传输后用于SLCAN;上述设置后USB将停止输出mavlink数据转变为SCLAN端口;将在重启后恢复MAVlink传输。
升级固件
使用Dronecan GUI TOOL软件进行升级
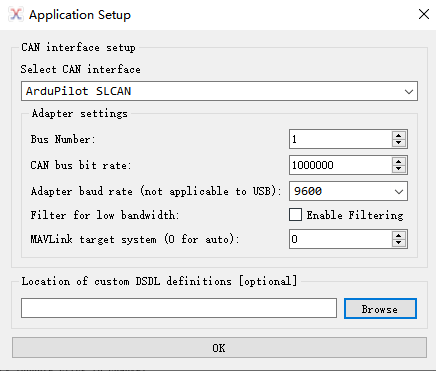
- 选择选择slcan对应的设备端口,点击ok
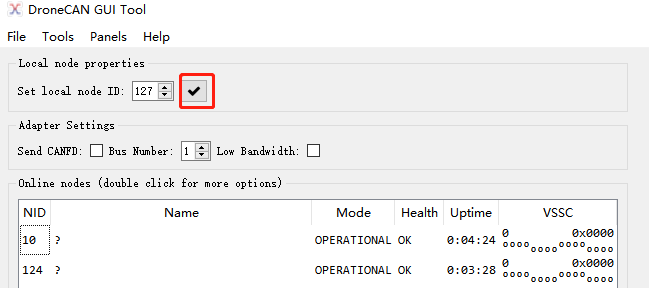
*点击“√”;然后双击设备信息(下图标识2处)
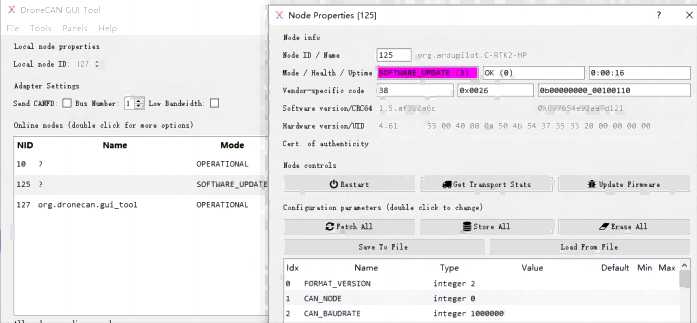
- 点击"update firmware",弹出信息框点“yes"
- mode/heakth/uptime项变为”SOftware_update"
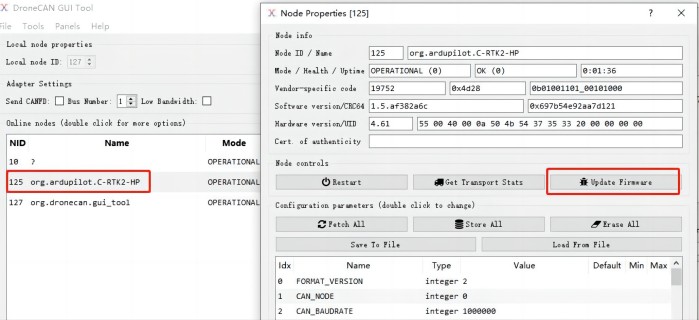
- 等待固件烧录完成
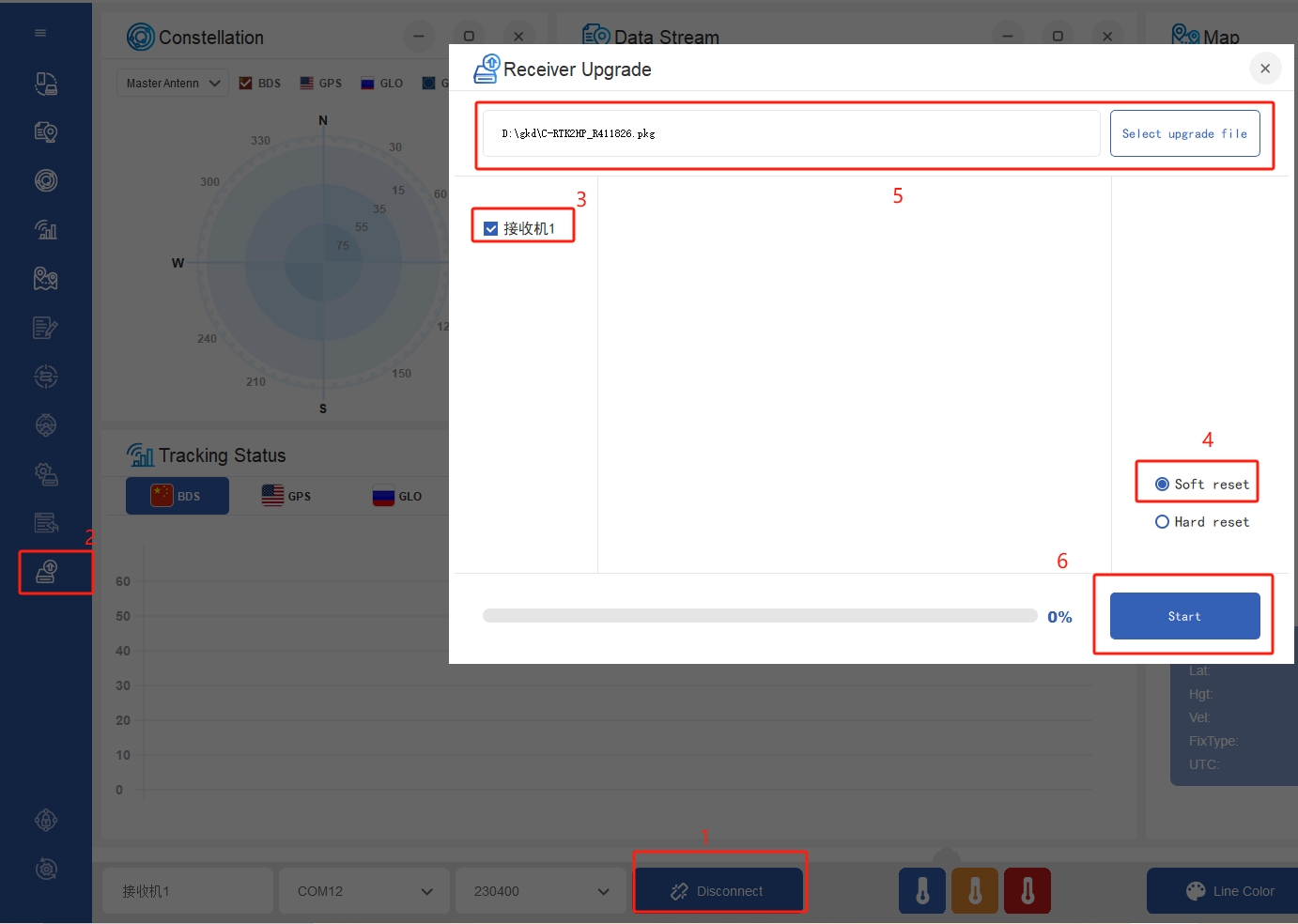
升级定位系统固件
- 使用USB电缆将C-RTK2 HP连接到电脑
- 运行Uprecise 软件,按照下图步骤升级固件。