飞行数据 介绍和使用
概述:
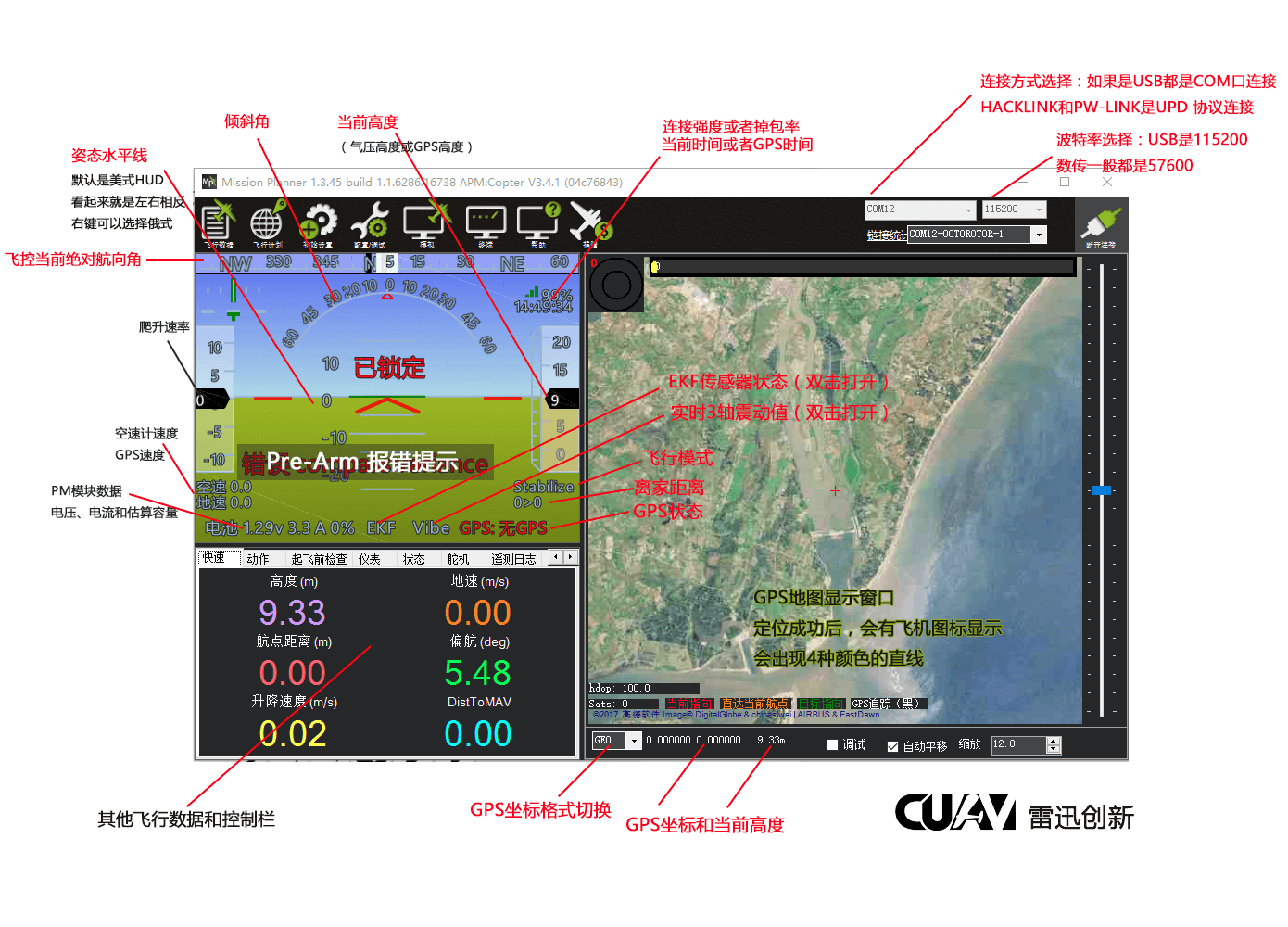
飞行数据 是MP地面站的默认主界面,它可以很直观的显示你的无人机状态,包括姿态、速度、高度、离家距离、GPS位置信息等等
它一共可以划分为3大功能区域:
- 飞行HUD窗口(左上)
- 状态显示和控制选项栏(左下)
- 地图及飞机实时位置信息(右)
下面开始详细介绍每一个区域的功能
主界面介绍视图 :
 状态显示和飞行控制栏 介绍:
状态显示和飞行控制栏 介绍:
快速显示栏
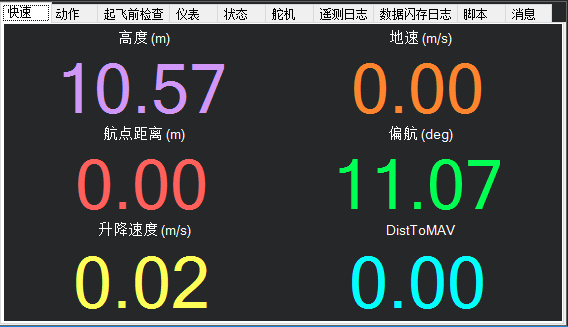
主要显示6个参数:当前高度 、低速、航点距离、偏航角度(航向角)、升降速度、DistToMav(无人机离家的距离)
动作控制
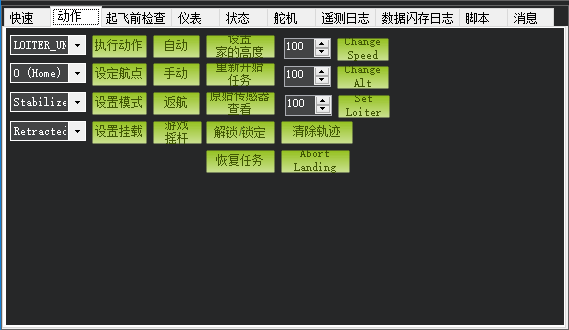
这个功能栏,主要是可以对无人机做实时的模式切换、任务控制、高度、速度控制
原始传感器 :可以查看原始传感器的数据,做一些性能或者故障分析
游戏摇杆:可以设置USB手柄映射一个遥控器通道,对飞行器进行控制(不建议使用,传统数传丢包可能导致控制不流畅)
起飞检查功能
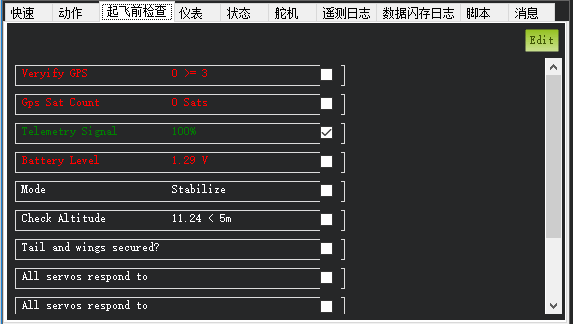
可以帮助新手检查和判断飞行器是否能满足飞行条件
比如GPS卫星数量提示、电压提示
不满足会显示红色,通过为绿色
还可以通过EDIT按钮,进行编辑相关提示选项和阈值
状态:详细飞行数据显示
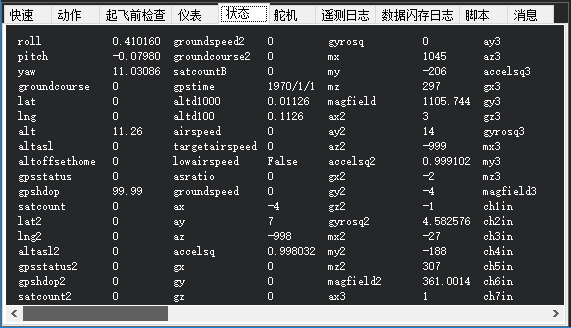
这里可以显示所有的飞控数据,包括传感器数据,通道输入输出数据等等
可以用于飞行和调试
显示值都比较简单和明了,内容过多,不再一一介绍舵机 -通道控制
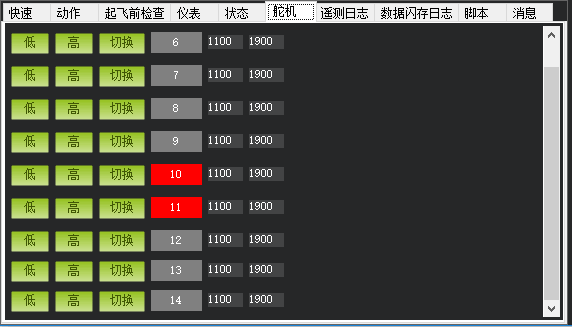
舵机-虽然名字为舵机,实际也不一定是用于舵机控制
实际是一个PWM通道输出控制,在多旋翼中,接了电调的通道是无法控制的
可以实时控制一个空余通道的PWM值输出遥测日志
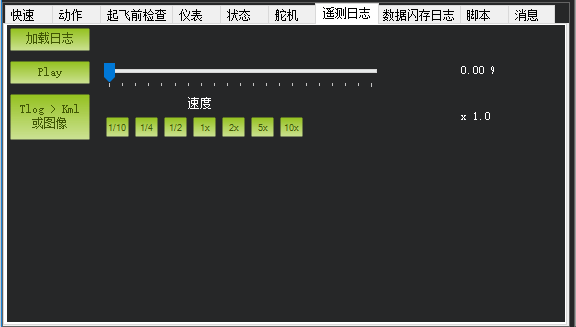
用于加载和播放地面站记录的日志数据闪存日志
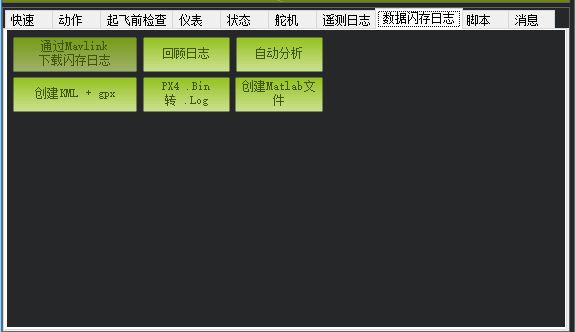
通过Mavlink 下载闪存日志:可以USB或者数传下载飞控内部记录的飞行日志
回顾日志:打开闪存日志可以做详细的分析
自动分析:使用程序自动分析功能自动分析闪存日志,直接得出分析结果,可以很明了查看飞行器的震动值、罗盘等数据是否健康达标。
创建KML+gpx
PX4.bin转.log
创建Matlab文件脚本
加载控制脚本
消息
显示飞行器发送过来的Pre-Arm信息